
Downloads
 Download
Download






This work is licensed under a Creative Commons Attribution 4.0 International License.
Article
Guaranteed Cost Intermittent Control for Discrete-Time System: A Data-Driven Method
Yi Zou and Engang Tian *
School of Optical-Electrical and Computer Engineering, University of Shanghai for Science and Technology, Shanghai 200093, China
* Correspondence: tianengang@163.com
Received: 10 September 2023
Accepted: 27 November 2023
Published: 24 September 2024
Abstract: This paper explores a data-driven method to investigate the stabilization of intermittent controlled discrete-time systems (ICDTSs) with unknown parameter matrices. First, the pre-collected inputstate data is used to supersede the accurate prior system model. Then, in order to obtain the data-dependent stabilization conditions of ICDTSs, a novel relationship is designed among the control width, rest width, and convergence rate. Unlike existing studies on the stabilization of ICDTSs, this paper only needs the collected input-state data. Thus, the time-consuming process of model identification is avoided. In addition, to ensure an acceptable performance level, the data-based guaranteed cost control is also considered, and a new cost function for ICDTSs is correspondingly built. Finally, two simulations are presented to demonstrate the effectiveness of the theoretical analysis.
Keywords:
data-driven approach discrete-time system guaranteed cost intermittent control1. Introduction
Discrete-time systems (DTSs) have wide engineering applications in networked control systems, image processing, and model identification [1–5]. Recently, stability and stabilization analysis of DTSs have captured much attention [6–8], and various kinds of control schemes have been proposed for stabilization of DTSs, for instance, pinning control [9], event-triggered control [10, 11], quantized control [12], intermittent control (IC) [13], etc.
In some practical applications, control of these systems is intermittent, and it is unnecessary to maintain continuous control, such as wind power generation management, vehicle control and orbital adjustment of space shuttles. In addition, IC has demonstrated significant advantages over continuous control [14–15]. For example, IC can effectively reduce the control cost because the control input is zero in some time domains, thus having the advantages of robustness and ease of implementation [13]. Nevertheless, it is not easy to stabilize the DTSs via IC since the closed-loop modes with nonzero inputs and the open-loop modes with zero inputs operate alternately according to the control law. Nowadays, interesting work on the stabilization of DTSs via IC has been reported in [16–20]. To achieve the control performance, certain restrictions must be imposed on the width of both control and rest intervals. For example, the control interval with a common lower bound and the rest interval with an upper bound have been proposed to constrain IC in [16, 17]. This restriction greatly reduces the flexibility of the IC scheme. Authors in [18–20] have proposed the nations of the average activation time ratio and the average activation period for intermittently controlled neural networks. Note that the idea behind the average activation time ratio and the average activation period, comes from the average dwell time, which requires designing the distribution of the control intervals throughout the time domain in advance. Obviously, the analysis technique of the average activation time ratio and the average activation period poses more challenges to verify the stabilization conditions in practical applications. As a result, it promotes us to develop novel analysis techniques for intermittently controlled DTSs (ICDTSs).
In the control community, it is insufficient to focus only on the control performance, and attention should also be paid to the adequate level of the control performance [21]. For this point, guaranteed cost control (GCC) has been proposed to stabilize the controlled system and guarantee a specific performance level for arbitrary admissible values. Recently, some researchers have devoted themselves to the GCC of DTSs based on continuous control schemes [22–24]. Moreover, authors in [25] and [26] have put forward the optimal guaranteed cost IC (GCIC) for air conditioning systems and uncertain freight train systems, respectively. In [27], the guaranteed cost periodic IC has been designed to achieve finite-time consensus of nonlinear multi-agent systems. Note that some constraints on IC have not been solved in references [25–27], and the above IC results have been limited to continuous-time systems. To the best of our knowledge, the GCC for ICDTSs has still been an open problem, which is another motivation of this paper.
It is important to emphasize that all the results in [16–20], [22–27] are model-based ones which require accurate model information. Generally, the control synthesis criteria (for dynamical systems based on accurate mathematical models) are often too idealistic in practical applications, making it a challenging task to acquire accurate mathematical models in many engineering systems. Compared with the establishment of an accurate mathematical model, it is easier to measure the trajectories of a system. Naturally, by using measured system data, the model identification methods have been developed to estimate the system models and solve the subsequent control tasks [28–30], whereas the process of system identification is usually time-consuming.
To overcome this drawback, data-driven control methods have drawn much attention [31–35], where controllers are synthesized directly from available data without explicitly undertaking model identification. This approach not only has conceptual appeals, but also valuable merits in situations where system identification becomes arduous or even unattainable. Considering the advantages of these aforementioned methods, research results on stabilization of dynamic systems have been reported successively based on data-driven control. For instance, data-driven control has been addressed in [36] for delayed discrete-time systems. In [37], authors have discussed the stabilization, robustness and linear quadratic regulation problems of discrete-time systems based on data-driven formulas. The data-driven control of distributed event-triggered systems has been considered in [38–39]. Utilizing input-state data, the stability analysis of continuous-time systems has been investigated in [40] under aperiodic sampling control. Considering the actuator faults, the data-driven fault-tolerant control has been considered in [41] for discrete-time systems, where stability conditions have been derived based on the linear matrix inequality method. Nevertheless, to the best of our knowledge, the existing research on data-driven control has been limited to continuous control schemes, and there has been no published results on data-driven stabilization of ICDTSs, not to mention GCC for ICDTSs. This inspires the research of this paper.
In summary, this paper focuses on studying data-driven stabilization of ICDTSs. The novelties of this paper lie in the following aspects.
1) Data-dependent stabilization criteria are derived for ICDTSs, where accurate information of system matrices is not required. This essentially improves the findings obtained in [16–20].
2) The novel IC scheme is proposed that can adjust flexibly the relationships among the control width, rest width, and convergence rate, and this relaxes those corresponding conditions in [16–20].
3) A new cost function is constructed for ICDTSs. Based on the proposed IC scheme, GCC technique and data-driven approach, the data-driven GCIC scheme is designed for DTSs with unknown system matrices.
The rest of this paper is structured as follows. Section II introduces the model of ICDTSs and some preliminaries, while Section III gives sufficient criteria for the stabilization and GCC of ICDTSs. Section IV provides two numerical examples to show the effectiveness of our results. Finally, Section V presents the conclusions.
2. Model Formulations and Preliminaries
2.1. Notations
and are the sets of nonnegative integers and positive integers, respectively. and denote -dimension vectors and real matrices, is the identity matrix with -dimension. is the zero matrix. means the Moore-Penrose inverse of . denotes the diagonal matrix. is the Euclidean norm of a vector. The symbol in a matrix denotes the symmetric part of the matrix.
2.2. System Description
Consider a strictly increasing time sequence with and . Denote and , . An ICDTS is modeled as
where signifies the state vector of (1),
The main objective of this study is to develop data-based control schemes such that system (1) realizes asymptotic stabilization, i.e., , for any initial condition.
Remark 1: In this paper, the structure of system model (1) is known but the parameter matrices and are assumed to be unknown. Hence, the presented system model is different from those presented in [16–19]. Notice that, when the system parameter matrices and in system (1) are unknown, the analysis approaches in [16–19] are inapplicable. It is well known that the process of identification parameter matrices is time-consuming, difficult, and even unattainable. Consequently, how to derive the stabilization criteria for system (1) is our main work by using only the collected input-state data.
2.3. Data-Based System Representation
To accomplish the control objective, a data-based representation of system (1) will be established in this subsection. Some imperative assumptions are presented, an important Lemma is given, and the input-state data is used to represent the closed-loop system (1a) for .
Assumption 1: The matrix pair in system (1) is stabilizable.
Assume that the state data and control input data of system (1) are available at discrete time instants . These measurements can be arranged in a stacked format to form the following data matrices:
where is used to emphasize the quantity of sample data collected from the system during the experiment.
Assumption 2: The state and input sequences and are available off-line, and the matrix has full row rank, i.e.
where denotes the number of recorded data.
Remark 2: The rank condition (3) plays an important role in the following research, requiring that the recorded data is sufficiently rich. In fact, Assumption 2 can be easily verified for the collected data set. As mentioned in [42], Assumption 2 holds when is persistently excited of order .
Lemma 1: Suppose that Assumption 2 is true and there is a matrix satisfying Then, the data representation of system (1a) is
Furthermore, the control input is designed as
Proof: Apparently, system (1a) can be rewritten as
Following the Rouché-Capelli theorem [43] and Assumption 2, there exists a matrix such that
From system (1a), one has
From (7), (5) can be rewritten as
Correspondingly, it can be derived from (6) that the control input can be expressed as
The proof is finished.
Remark 3: Lemma 1 indicates that the data and satisfy the rank condition (3) and contain all the information of system (1). The rank condition also means that the minimum data length is . Lemma 1 not only provides a pure data-based representation of the closed-loop system (1), but also gives an analytic expression of the control gain by using the input-state data.
Lemma 2 (Schur Complement [44]): For proper dimension matrices and , the linear matrix inequality
is equivalent to any one of the following two conditions:
3. Main Outcomes
This section proposes a data-driven approach to solve the stabilization problem of the ICDTS (1) with unknown parameter matrices. By using the result of Lemma 1, Theorem 1 presents the data-based stabilization conditions for ICDTS (1). In addition, considering the cost performance, the data-driven GCC is proposed in Theorem 2. Note that the IC schemes used in Theorems 1–2 remove some constraint conditions on the relationships among the control width, rest width, and convergence rate.
3.1. Data-Based Stabilization Criteria for ICDTS (1)
Denote , , , and . Moreover, and are the widths of and , respectively.
The following result is given about the data-based stabilization conditions of the ICDTS (1).
Theorem 1: Suppose that Assumptions 1–2 hold. For given constants and , the ICDTS (1) is said to achieve asymptotic stabilization if there exist matrices and such that
In addition, the control gain is designed as
Proof: Select the following Lyapunov function candidate
where .
Define . For , one can obtain
According to Lemma 1, the data representation of parameter matrices can be represented as
subject to
Denote , and . Then, from equations (19)-(20), it is easy to obtain the following constraint conditions:
In addition, from (17) and (18), (16) can be rewritten as
where the definitions of and are presented above Theorem 1.
Note that from (7), one has . Hence, we can obtain
Combining (22) and (21), we have
Then, by using Lemma 2, condition (9) is equivalent to
Therefore, for , we have
Similarly, for , it is easy to obtain from (15), (17) and (22) that
Furthermore, Lemma 2 and condition (10) imply
Thus, for , we have
Next, we study the evolution of in view of condition (11) and inequalities (24) and (26). By induction, for , we have
It follows from that
Obviously, for any , there exists such that . When , one has , and . It follows from (11), (15) and (16) that and . As a result, it is concluded that which implies . This completes the proof.
Remark 4: Without using the information of matrices and , Theorem 1 derives the data-dependent stabilization criterion for ICDTSs. This is fundamentally different from the results presented in [16–20]. Compared with the existing data-driven results based on continuous control in [36–41], the IC scheme used in Theorem 1 has many merits such as the improved robustness, low control cost, and convenient operation in practice.
Remark 5: A novel relationship (11), among the control interval , rest interval and convergence rate and , is presented to enhance the application range of the IC scheme. Recently, [16–20] have focused on the stabilization or synchronization of DTSs with known parameter matrices and via the IC scheme. Note that there are some harsh restrictions on the IC scheme. For instance, the upper bound of the rest width and the lower bound of the control width have been proposed in advance in [16, 17]. Based on the concept of the average dwell time, authors in [18–20] have used the average activation time ratio and the average activation period to astrict the control interval and the rest interval . The distribution of control intervals over the entire time domain is required in advance, which reduces the flexibility of practical applications. In Theorem 1, as long as condition (11) holds, the widths of the control interval and the rest interval can be adjusted flexibly according to specific requirements. For example, if the value is fixed, the rest width can be increased as the value of increases. Moreover, the result of Theorem 1 can be applied to DTSs under both periodic and aperiodic IC schemes.
If , the ICDTS (1) becomes a DTS with a continuous control scheme, i.e.,
According to Theorem 1, the following corollary can be derived.
Corollary 1: Suppose that Assumptions 1–2 hold. For a positive constant , if there exist matrices and such that (9), (12) and (13) hold. Then, system (29) is asymptotically stable with the control input . Besides, the control gain can be obtained as
3.2. Data-Driven GCC
This subsection develops a GCC based on the data-driven approach for the ICDTS (1). Inspired by [24, 25], a new infinite-horizon cost function for intermittently controlled system is designed as
where and are given positive definite weighted matrices. Then, our goal is to design the control input such that system (1) can achieve the following GCIC.
Definition 1: System (1) is said to achieve GCIC if there exist an intermittent control law and a positive constant such that system (1) is asymptotically stable, and the corresponding index of the guaranteed cost function (30) satisfies , where is called the guaranteed cost index.
Theorem 2: Suppose that Assumptions 1–2 hold. For given constants and , and weighted matrices and , if there exist a positive constant , and matrices and such that conditions (11)–(13) and inequalities
hold. Then, the following statements hold.
1) System (1) is asymptotically stable with the control input .
2) The cost function defined in (30) satisfies which is a guaranteed cost value of system (1).
Proof: Note that, it is easy to check that conditions (31) and (32) imply conditions (9) and (10) given in Theorem 1. Therefore, based on Theorem 1, conditions (11) and (31)–(32) ensure that the ICDTS (1) is asymptotically stable.
Next, we find the the upper bound of the guaranteed cost function .
Denote , and choose the same Lyapunov function (15). Then, it appears that, for ,
Based on the analysis in Theorem 1, equation (34) can be rewritten as
By Lemma 2, condition (31) implies
Hence, inequalities (35) and (36) indicate
When , one has
Therefore, it can be concluded from Lemma 2, condition (32) and inequality (38) that
From condition (11), and inequalities (37) and (39), we have the following equations for :
Similarly, for , one has
Letting . it can be obtained from both (40) and (41) that
Then, according to Lemma 2 and condition (33), inequality (42) further means
The proof is complete.
Remark 6: Theorem 2 presents the first investigation on the GCC for the ICDTS (1) with unknown parameter matrices. Accordingly, a novel cost function (30) is designed, and the sufficient data-based stabilization conditions are obtained. Although the GCIC for continuous systems has been considered in [25–27], such results have been strictly limited to the model-dependent case with severe restrictions of the control interval and the rest interval . Theorem 2 directly utilizes the collected input-state data to derive the stabilization criteria, avoiding the intricate process of parameter identification. Hence, Theorem 2 extends the results of [25–27].
Remark 7: The data-driven GCC problem of the ICDTS (1) has been addressed in Theorem 2, i.e. system (1) can realize stabilization when the cost function satisfies . Generally, the minimal means that the system has the optimal control cost, but solving the inequalities in Theorem 2 can only lead to a feasible solution of . In order to obtain the minimum value of , one can solve Theorem 2 according to Algorithm 1.
| 1 Algorithm 1 Calculate the minimal guaranteed cost |
| Input: Constants , . Matrices , , , . |
| Output: The minimal GCC . |
| 1: Given the upper limit value and the lower limit value of the cost function where , given the accuracy coefficient which is a small enough positive constant, set . |
| 2: while do |
| 3: if conditions(11)–(13) and (31)–(33) have feasible solutions then |
| 4: ; |
| 5: else |
| 6: ; |
| 7: end if |
| 8: if then |
| 9: ; |
| 10: |
| 11: end if |
| 12: end while |
| 13: Return ; |
For the DTS (29) with a continuous control scheme, the similar GCC results can directly be obtained.
Reconstruct the infinite-horizon cost function as
where and are defined in (30). Then, the following corollary can be derived from Corollary 1 and Theorem 2.
Corollary 2: Suppose that Assumptions 1–2 hold. For given positive constant , if there exist matrices , and the performance index such that conditions (12), (13), (31) and (33) hold. Then, the following statements hold.
1) System (29) is asymptotically stable with the control input .
2) The cost function defined in (44) satisfies .
4. Examples and Simulations
Two numerical examples are given in this section to demonstrate the validity of the proposed theoretical method.
Consider a batch reactor system with IC [45]. By discretizing the system with a sampling period of 0.1s, we obtain the following ICDTS [37]:
where , . The data is collected by running an experiment with random initial values and the random input sequence is generated by utilizing the MATLAB command rand. The data of length is collected which is sufficient for Assumption 2.
Example 1: This example is given to verify the effectiveness of Theorem 1. When there is no control input, the trajectories of the error system are depicted in Figure 1. It is indicated that the DTs (1) is unstable without control. Set and . The control intervals are selected as , and the uncontrolled intervals are . For the above intervals, it is easy to find that , which means that condition (11) is satisfied. By using CVX to solve conditions (9)–(13) in Theorem 3.1, the feedback gain is obtained as
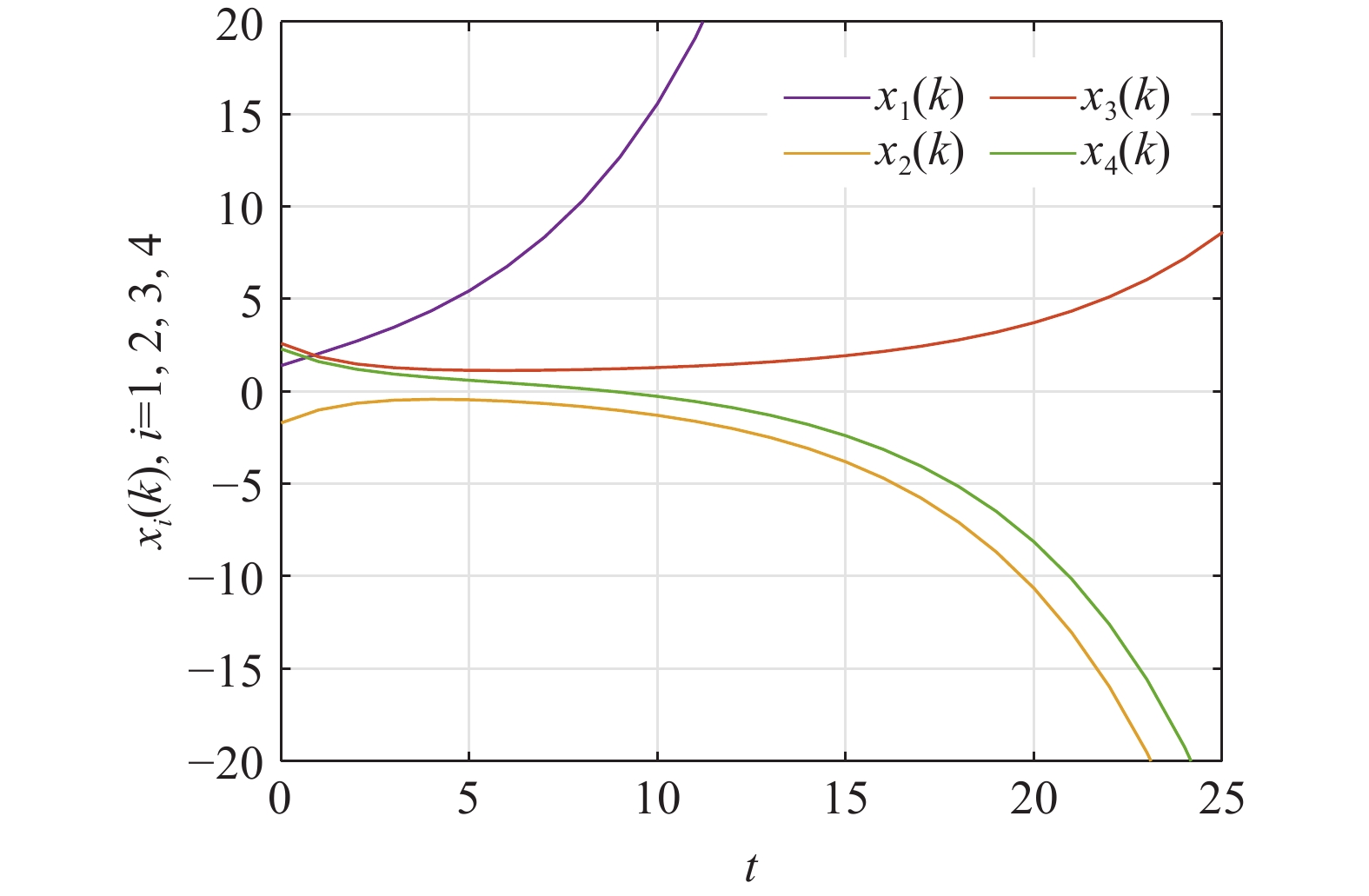
Figure 1. Trajectory of the state without controller, .
The control gain based on the accurate system parameters is computed to compare with Theorem 1. According to the model-based stabilization method, the controller gain is obtained as follows:
We simulate the stabilization of system (1) with the above two gains. The trajectories of the state under the data-based controller is presented by the solid line in Figure 2, and the trajectories of the state under the model-based controller is also displayed in this figure by the dotted line. From Figure 2, one can conclude that, under the same circumstance, both controllers can achieve the control purpose. Based on Figure 1 and Figure 2, the effectiveness of the controller designed in this paper is clearly demonstrated. In addition, to further highlight the superiority of the IC in this paper, the concept of the control ratio is introduced, which is defined as . Table 1 shows the control ratios of this paper and other references, and it is clear from the table that the control ratio in this paper is significantly smaller than those in other references.
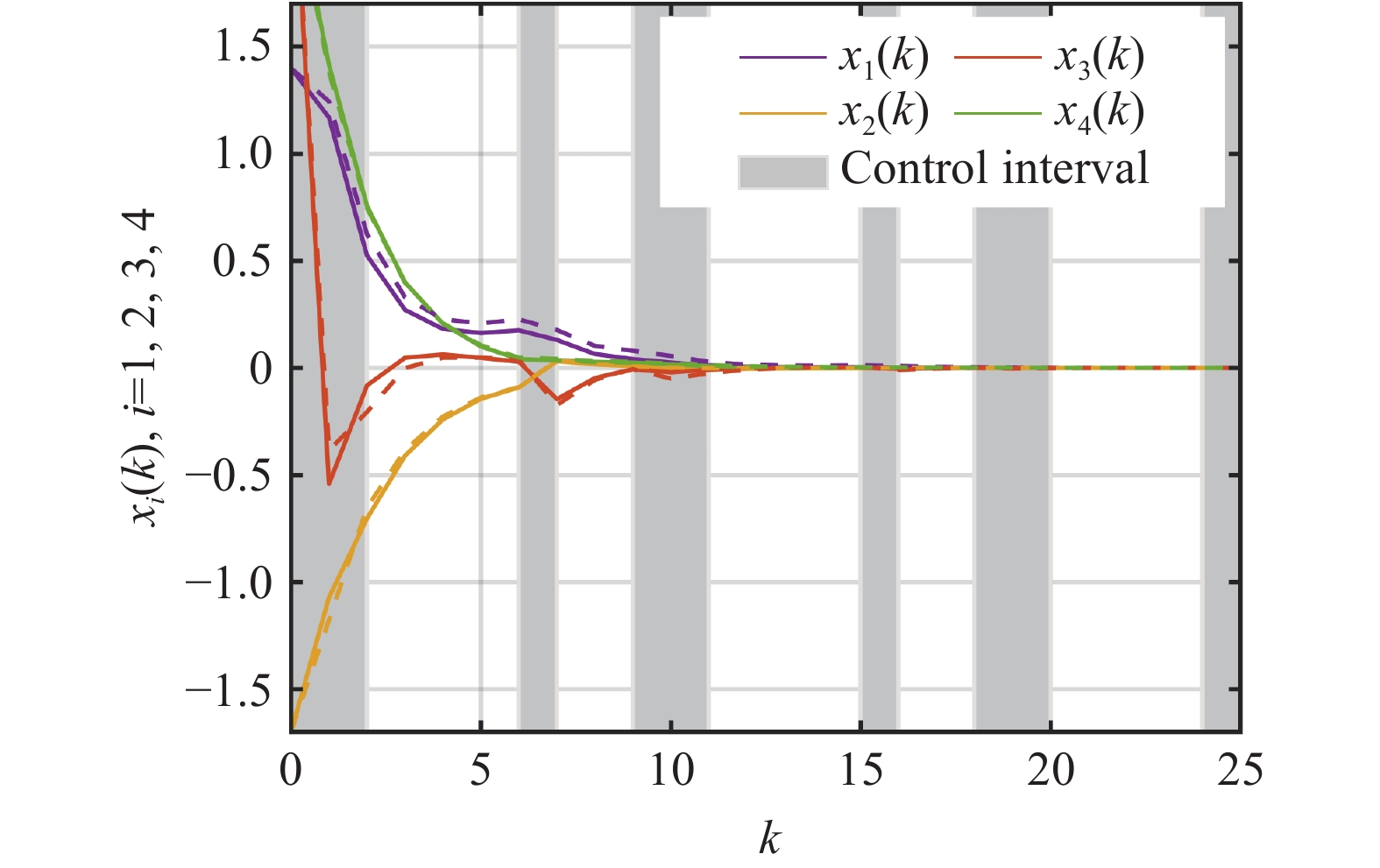
Figure 2. Trajectory of the state in Example 1: (a) solid line shows the trajectories of state under controller and (b) dotted line shows the trajectories of state under controller , .
| Reference | in this paper | [13] | [18] | [16] | [19] |
| control ratio | 33% | 50% | 70% | 66% | 83% |
Example 2: In this example, the GCC under the IC strategy is considered. The matrices in the cost function (30) are chosen to be and , and the rest parameters are the same as that in Example 1. We first solve (31)–(33) according to Algorithm 1, and derive the minimum guaranteed cost and the control gain
Figure 3 depicts the state curves of , which shows system (1) is asymptotically stable with the control gain . Moreover, the curve of the cost function is described in Figure 4, from which one can see that the cost function is smaller than . So, the effectiveness of Theorem 2 is confirmed.
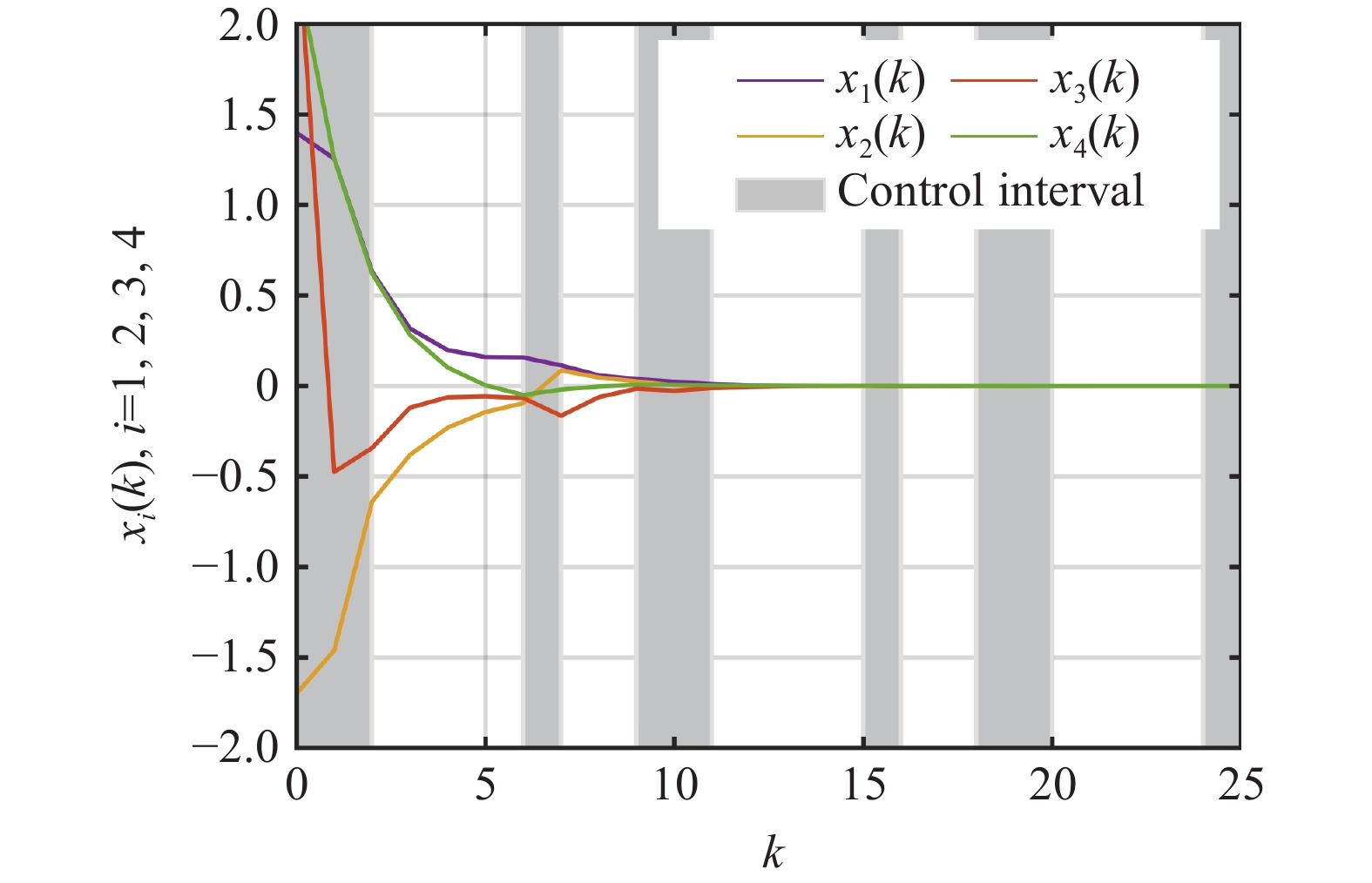
Figure 3. Trajectory of the state with controller .
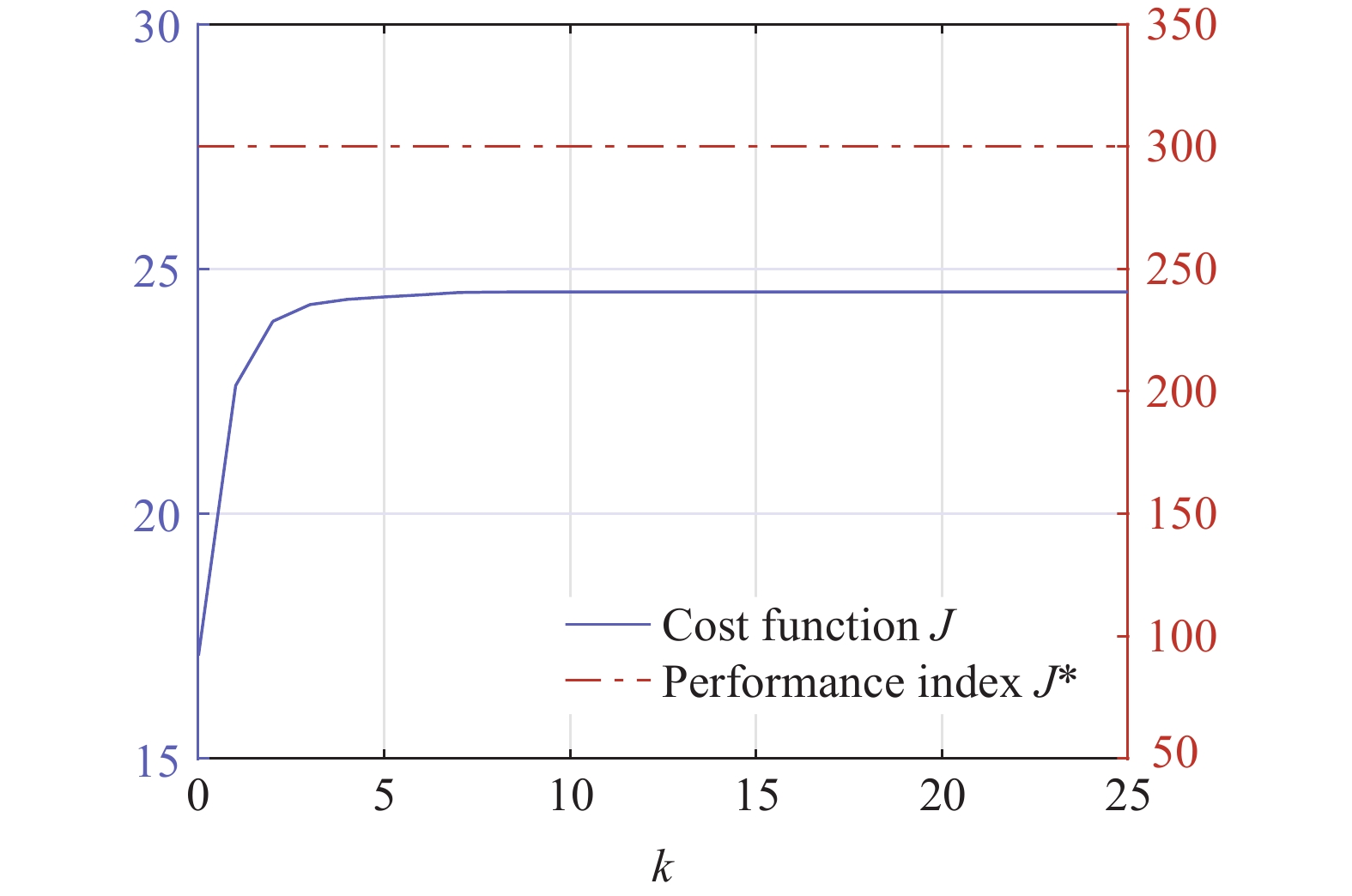
Figure 4. The solid line shows the trajectory of the cost function , the dotted line shows the value of .
5. Conclusions
In this paper, the GCC of ICDTSs with unknown parameter matrices has been investigated. The data-driven method has been adopted without the process of model identification. The IC scheme with relaxed restrictions has been designed utilizing the input-state data. The sufficient data-dependent stability conditions have been derived to ensure the stabilization of the system. Moreover, based on the novel cost function constructed for ICDTSs, the data-driven GCC has been explored. Finally, the numerical simulations have verified the validity of the theoretical analysis.
In general, finite-time control drives system states into predetermined orbits within a finite time, thus having more advantages over asymptotic control in terms of time optimization. Consequently, our future work will focus on achieving data-driven finite-time stabilization of systems by using intermittent control.
Author Contributions: Yi Zou: Conceived the idea, designed the experiments, and drafted the paper. Engang Tian:Provided guidance on the scheme design and revised the paper.
Funding: This work was supported by the National Natural Science Foundation of China under Grant 62173231.
Data Availability Statement: Not applicable.
Conflicts of Interest: The authors declare no conflicts of interest.

References
- Daafouz, J.; Bernussou, J. Parameter dependent Lyapunov functions for discrete time systems with time varying parametric uncertainties.
Syst. Control Lett .2001 ,43 , 355–359. doi: 10.1016/S0167-6911(01)00118-9 - Yang, X.S.; Wan, X.X.; Cheng, Z.S.;
et al . Synchronization of switched discrete-time neural networks via quantized output control with actuator fault.IEEE Trans. Neural Netw. Learn. Syst .2021 ,32 , 4191–4201. doi: 10.1109/TNNLS.2020.3017171 - Tripathy, N.S.; Kar, I.N.; Paul, K. Stabilization of uncertain discrete-time linear system with limited communication.
IEEE Trans. Autom. Control 2017,62 , 4727–4733. doi: 10.1109/TAC.2016.2626967 - Wang, X.L.; Sun, Y.; Ding, D.R. Adaptive dynamic programming for networked control systems under communication constraints: A survey of trends and techniques.
Int. J. Netw. Dyn. Intell .2022 ,1 , 85–98. doi: 10.53941/ijndi0101008 - Zhang, Q.C.; Zhou, Y.Y. Recent advances in non-Gaussian stochastic systems control theory and its applications.
Int. J. Netw. Dyn. Intell .2022 ,1 , 111–119. doi: 10.53941/ijndi0101010 - Guo, Y.Q.; Wu, Y.H.; Gui, W.H. Stability of discrete-time systems under restricted switching via logic dynamical generator and STP-based mergence of hybrid states.
IEEE Trans. Autom. Control 2022,67 , 3472–3483. doi: 10.1109/TAC.2021.3105319 - Haddad, W.M.; Lee, J. Finite-time stability of discrete autonomous systems.
Automatica 2020,122 , 109282. doi: 10.1016/j.automatica.2020.109282 - Shi, C.Y.; Vong, S. Finite-time stability for discrete-time systems with time-varying delay and nonlinear perturbations by weighted inequalities.
J. Franklin Inst .2020 ,357 , 294–313. doi: 10.1016/j.jfranklin.2019.09.028 - Zhang, H.F.; Li, K.Z.; Fu, X.C. On pinning control of some typical discrete-time dynamical networks.
Commun. Nonlinear Sci. Numer. Simul . 2010,15 , 182–188. doi: 10.1016/j.cnsns.2009.01.019 - Qu, F.R.; Zhao, X.; Wang, X.M.;
et al . Probabilistic-constrained distributed fusion filtering for a class of time-varying systems over sensor networks: A torus-event-triggering mechanism.Int. J. Syst. Sci .2022 ,53 , 1288–1297. doi: 10.1080/00207721.2021.1998721 - Yang, X.S.; Feng, G.Y.; He, C.T.; et al. Event-triggered dynamic output quantization control of switched T-S fuzzy systems with unstable modes. IEEE Trans. Fuzzy Syst., 2022, 30: 4201−4210. doi: 10.1109/TFUZZ.2022.3145808
- Zhang, Y.Q.; Mu, X.W. Event-triggered output quantized control of discrete Markovian singular systems. Automatica, 2022, 135: 109992. doi: 10.1016/j.automatica.2021.109992
- Liu, L.; Perc, M.; Cao, J.D. Aperiodically intermittent stochastic stabilization via discrete time or delay feedback control. Sci. China Inf. Sci., 2019, 62: 72201. doi: 10.1007/s11432-018-9600-3
- Liu, B.; Yang, M.; Liu, T.; et al. Stabilization to exponential input-to-state stability via aperiodic intermittent control. IEEE Trans. Autom. Control, 2021, 66: 2913−2919. doi: 10.1109/TAC.2020.3014637
- Rabiee, A.; Soroudi, A. Stochastic multiperiod OPF model of power systems with HVDC-connected intermittent wind power generation. IEEE Trans. Power Delivery, 2014, 29: 336−344. doi: 10.1109/TPWRD.2013.2259600
- Li, Y.; Zhang, H.B.; Xu, X.Z. Virtual-clock-dependent H∞ controller design for discrete-time switched interval type-2 fuzzy systems with intermittent control inputs. Inf. Sci., 2022, 595: 38−53. doi: 10.1016/j.ins.2022.02.013
- Xiao, Z.J.; Guo, Y.R.; Li, J.Y.; et al. Anti-synchronization for Markovian neural networks via asynchronous intermittent control. Neurocomputing, 2023, 528: 217−225. doi: 10.1016/j.neucom.2023.01.066
- Wang, P.F.; He, Q.J.; Su, H. Stabilization of discrete-time stochastic delayed neural networks by intermittent control. IEEE Trans. Cybern., 2023, 53: 2017−2027. doi: 10.1109/TCYB.2021.3108574
- Wang, P.F.; Zhang, Q.; Su, H. Aperiodically intermittent control for synchronization of discrete-time delayed neural networks. J. Franklin Inst., 2022, 359: 4915−4937. doi: 10.1016/j.jfranklin.2022.04.033
- Tao, H.M.; Tan, H.L.; Chen, Q. W.; et al. H∞ state estimation for memristive neural networks with randomly occurring DoS attacks. Syst. Sci. Control Eng., 2022, 10: 154−165. doi: 10.1080/21642583.2022.2048322
- Pinto, E.R.; Nepomuceno, E.G.; Campanharo, A.S.L.O. Individual-based modelling of animal brucellosis spread with the use of complex networks. Int. J. Netw. Dyn. Intell., 2022, 1: 120−129. doi: 10.53941/ijndi0101011
- Hu, S.; Yin, X.; Zhang, Y.; et al. Event-triggered guaranteed cost control for uncertain discrete-time networked control systems with time-varying transmission delays. IET Control Theory Appl., 2012, 6: 2793−2804. doi: 10.1049/iet-cta.2012.0036
- Yan, H.C.; Zhang, H.; Yang, F.W.; et al. Event-triggered asynchronous guaranteed cost control for Markov jump discrete-time neural networks with distributed delay and channel fading. IEEE Trans. Neural Netw. Learn. Syst., 2018, 29: 3588−3598. doi: 10.1109/TNNLS.2017.2732240
- Xue, M.; Yan, H.C.; Zhang, H.; et al. Event-triggered guaranteed cost controller design for T-S fuzzy Markovian jump systems with partly unknown transition probabilities. IEEE Trans. Fuzzy Syst., 2021, 29: 1052−1064. doi: 10.1109/TFUZZ.2020.2968866
- Mei, J.; Lu, Z.Y.; Hu, J.H.; et al. Energy-efficient optimal guaranteed cost intermittent-switch control of a direct expansion air conditioning system. IEEE/CAA J. Autom. Sin., 2021, 8: 1852−1866. doi: 10.1109/JAS.2020.1003447
- Hu, J.H.; Ruan, Z.Y.; Mei, J.; et al. Optimal guaranteed cost intermittent control to the efficient movement of freight trains. ISA Trans., 2022, 130: 235−252. doi: 10.1016/j.isatra.2022.03.030
- Luo, Y.P.; Wang, X.E.; Cao, J.D. Guaranteed-cost finite-time consensus of multi-agent systems via intermittent control. Math. Methods Appl. Sci., 2022, 45: 697−717. doi: 10.1002/mma.7806
- Ljung, L.
System Identification: Theory for the User ; Prentice-Hall: Englewood Cliffs, USA,1987 . - Van Overschee, P.; De Moor, B.
Subspace Identification for Linear Systems: Theory-Implementation-Applications ; Springer: New York, USA,1996 . - Li, H.; Wu, P.S.; Zeng, N.Y.; et al. A survey on parameter identification, state estimation and data analytics for lateral flow immunoassay: From systems science perspective. Int. J. Syst. Sci., 2022, 53: 3556−3576. doi: 10.1080/00207721.2022.2083262
- van Waarde, H.J.; Eising, J.; Trentelman, H.L.; et al. Data informativity: A new perspective on data-driven analysis and control. IEEE Trans. Autom. Control, 2020, 65: 4753−4768. doi: 10.1109/TAC.2020.2966717
- Qi, W.L.; Liu, K.Z.; Wang, R.; et al. Data-driven L2-stability analysis for dynamic event-triggered networked control systems: A hybrid system approach. IEEE Trans. Ind. Electron., 2023, 70: 6151−6158. doi: 10.1109/TIE.2022.3194657
- Gao, W.N.; Jiang, Y.; Davari, M. Data-driven cooperative output regulation of multi-agent systems via robust adaptive dynamic programming.
IEEE Trans. Circuits Syst. II: Express Briefs 2019,66 , 447–451. doi: 10.1109/TCSII.2018.2849639 - Liu, H.; Li, X.J.; Deng, C.;
et al . Fault estimation and control for unknown discrete-time systems based on data-driven parameterization approach.IEEE Trans. Cybern .2023 ,53 , 1629–1640. doi: 10.1109/TCYB.2021.3107425 - Ji, D.A.; Wang, C.; Li, J.H.;
et al . A review: Data driven-based fault diagnosis and RUL prediction of petroleum machinery and equipment.Syst. Sci. Control Eng .2021 ,9 , 724–747. doi: 10.1080/21642583.2021.1992684 - Rueda-Escobedo, J.G.; Fridman, E.; Schiffer, J. Data-driven control for linear discrete-time delay systems.
IEEE Trans. Autom. Control 2022,67 , 3321–3336. doi: 10.1109/TAC.2021.3096896 - De Persis, C.; Tesi, P. Formulas for data-driven control: Stabilization, optimality, and robustness.
IEEE Trans. Autom. Control 2020,65 , 909–924. doi: 10.1109/TAC.2019.2959924 - Li, Y.F.; Wang, X.; Sun, J.;
et al . Data-driven consensus control of fully distributed event-triggered multi-agent systems.Sci. China Inf. Sci .2023 ,66 , 152202. doi: 10.1007/s11432-022-3629-1 - Wang, X.; Sun, J.; Wang, G.;
et al . Data-driven control of distributed event-triggered network systems.IEEE/CAA J. Autom. Sin .2023 ,10 , 351–364. doi: 10.1109/JAS.2023.123225 - Wildhagen, S.; Berberich, J.; Hertneck, M.;
et al . Data-driven analysis and controller design for discrete-time systems under aperiodic sampling.IEEE Trans. Autom. Control 2023,68 , 3210–3225. doi: 10.1109/TAC.2022.3183969 - Sun, Y.C.; Fan, Q.Y.; Li, H.X.;
et al . Data-driven fault-tolerant control for discrete-time systems based on LMI.IFAC-PapersOnLine 2022,55 , 160–165. doi: 10.1016/j.ifacol.2022.05.028 - Willems, J.C.; Rapisarda, P.; Markovsky, I.;
et al . A note on persistency of excitation.Syst. Control Lett .2005 ,54 , 325–329. doi: 10.1016/j.sysconle.2004.09.003 - Shafarevich, I.R.; Remizov, A.O.
Linear Algebra and Geometry ; Springer: Berlin Heidelberg,2013 . - Boyd, S.; Balakrishnan, V.; Feron, E.;
et al . Control system analysis and synthesis via linear matrix inequalities. InProceedings of 1993 American Control Conference, San Francisco, CA, USA, 2–4 June 1993 ; IEEE: New York, USA, 1993; pp. 2147–2154. doi: 10.23919/ACC.1993.4793262 - Walsh, G.C.; Ye, H. Scheduling of networked control systems.
IEEE Control Syst. Mag .2001 ,21 , 57–65. doi: 10.1109/37.898792


