
Downloads
 Download
Download






This work is licensed under a Creative Commons Attribution 4.0 International License.
Article
Fault-tolerant formation consensus control for time-varying multi-agent systems with stochastic communication protocol
Chunyu Li, Yifan Liu, Ming Gao, and Li Sheng *
1 College of Control Science and Engineering, China University of Petroleum (East China), Qingdao 266580, China
* Correspondence: E-mail: shengli@upc.edu.cn
Received: 4 September 2023
Accepted: 8 November 2023
Published: 26 March 2024
Abstract: This paper is concerned with the problem of fault-tolerant formation consensus control for linear time-varying (LTV) multi-agent systems (MASs) with stochastic communication protocol (SCP). The SCP is introduced to schedule the signal transmission, and only one neighbouring agent is allowed to transmit data at one instant. The purpose of this work is to design a fault-tolerant controller for each agent, so that, for all probabilistic scheduling behaviors, MASs can achieve the  formation consensus performance. The state and fault are augmented into a new vector, meanwhile, each agent system is written as a singular one and a state observer is designed. By utilizing the estimated information of states and faults, the designed time-varying compensation term can reduce the impacts of unknown external disturbances and faults. Then, a sufficient condition is obtained to guarantee the performance constraint over the finite horizon for closed-loop systems. The parameters of observers and controllers are derived by solving coupled backward recursive Riccati difference equations. Finally, a numerical example is given to validate the effectiveness of the proposed fault-tolerant control scheme.
formation consensus performance. The state and fault are augmented into a new vector, meanwhile, each agent system is written as a singular one and a state observer is designed. By utilizing the estimated information of states and faults, the designed time-varying compensation term can reduce the impacts of unknown external disturbances and faults. Then, a sufficient condition is obtained to guarantee the performance constraint over the finite horizon for closed-loop systems. The parameters of observers and controllers are derived by solving coupled backward recursive Riccati difference equations. Finally, a numerical example is given to validate the effectiveness of the proposed fault-tolerant control scheme.
Keywords:
fault-tolerant formation consensus control multi-agent systems backward recursive Riccati difference equations stochastic communication protocol1. Introduction
Formation control is one of the core problems in the research field of MASs. In many tasks, multi-agents need to maintain a predetermined geometrical shape, that is, formation, with each other in the process of moving toward a specific target or direction, such as effective search, patrol and exploration [1–4]. MASs have the characteristics of distributed composition and parallel execution of tasks, so multi-agent formation offers better fault tolerance and mission efficiency than a single agent and can acquire surrounding environment information as well as save fuel or energy in some vehicle systems, such as unmanned aerial vehicles (UAVs) and autonomous underwater vehicles (AUVs) [5,6]. In addition, formation control has a good prospect in industry, military and aviation [7], thus it has exerted much fascination on control communities.
Similar to sensor networks, the structure of MASs is more fragile than general centralized systems [8,9], and coupled with the harsh working environment, agents are easily to prone to the faults or cyberattacks [10], which may propagate to the healthy individuals through the special communication topology [11]. Therefore, to ensure the reliability and safety of MASs, it is essential that a robust and reliable fault-tolerant control (FTC) system completes its operation within an acceptable time window after fault occurrence in the presence of disturbances in the system [12]. The overall goal of FTC systems is to accommodate faults in the system components during operation and maintain stability with little or acceptable degradation in the performance levels [13]. Fault-tolerant formation control is usually considered as a special case of FTC, which is mainly divided into two categories characterized by whether there exists the fault detection and isolation (FDI) module. The active FTC system has its advantages in dealing with all kinds of faults, and the system can achieve the best FTC performance by reconstructing the controller [14]. The passive FTC system draws on the idea of robust control, and the designed controller has strong robustness for the fault of a certain severity [15].
By now, the fault-tolerant formation control over MASs has been widely studied and a rich body of algorithms have been proposed, where the observer approach has been extensively applied in the problem of FTC [16–22]. On the basis of the estimated state, fault and uncertainty information, fault-tolerant controllers were developed to achieve the desired formation objectives. For instance, in [16], two kinds of distributed finite-time observers were presented for each follower, thus eliminating the assumption that the leader’s information is derived by all agents directly. The problem of robust relative motion control in a multirobotic system was solved by sliding mode control technique in [17], where the parameters of fault were estimated using a residual-based synchronous fault-detection scheme. In [18], by virtue of introducing fault estimators, the developed controller was effective to compensate for actuator faults, sensor faults and unknown nonlinearity simultaneously. An adaptive fault-tolerant  output feedback control scheme was developed based on unknown input observers in [19,20]. Moreover, the fault-tolerant time-varying formation control problem has caused considerable attention from a variety of communities and a lot of distributed algorithms have been developed in [23–26]. However, only certain types of faults considered in the design stage can be treated by the passive FTC system. In general, from the perspective of performance, active FTC is superior to passive FTC scheme.
output feedback control scheme was developed based on unknown input observers in [19,20]. Moreover, the fault-tolerant time-varying formation control problem has caused considerable attention from a variety of communities and a lot of distributed algorithms have been developed in [23–26]. However, only certain types of faults considered in the design stage can be treated by the passive FTC system. In general, from the perspective of performance, active FTC is superior to passive FTC scheme.
Compared with time-invariant MASs, the convergence analysis on the FTC problem for time-varying MASs is more challenging due to the complexity caused by time variance [27]. Consensus problem is a fundamental problem in cooperative control of MASs, to mention a few, the leader-following consensus for time-varying MASs has been adequately discussed in [27–32]. Besides, in [33–36], many distributed algorithms have been developed for consensus problems of nonlinear time-varying MASs models expressed via various representations. However, it should be pointed out that studies on fault-tolerant formation control problem for time-varying MASs has not been properly studied so far.
In a typical network with limited bandwidth, multiple simultaneous transmissions on the network will lead to inevitable data conflicts. One of the effective ways to prevent data conflicts is to arrange the transmission of signals according to specific communication protocols. Communication protocols are extensively applied in MASs including SCP [37,38], try-once-discard (TOD) protocol [39], the round-robin (RR) protocol [40,41], and the random-access (RA), etc. Moreover, the use of communication protocols makes the system information incomplete [42], and hence the development of new control algorithms is of great significance to deal with the incomplete information.
Invoked by the above literature review, in this paper, we aim to deal with the problem of distributed fault-tolerant formation consensus control for a class of LTV MASs. This problem is by no means trivial due to the following identified technical challenges:
1) For a LTV MAS with unknown disturbances and faults, the faults will propagate along the communication topology, resulting in a significant reduction in formation consensus performance. How to design a FTC scheme to improve the system robustness to disturbances and faults?
2) For a LTV MAS under SCP scheduling, how to deal with the difficulty in the analysis of fault-tolerant formation consensus control problem caused by SCP scheduling?
3) How to obtain the state and fault information of the system simultaneously by the observer technique?
In light of those three questions, the main contributions of this paper are highlighted as follows:
1) A novel fault-tolerant formation consensus control scheme is, for the first time, proposed for a LTV MAS subjected to unknown external disturbances, system and sensor faults, directed topologies as well as SCP.
2) Under the premise of allowing a small sacrifice of formation consensus performance, a time-varying fault-tolerant controller is designed for each agent based on estimation information of observers, which can tolerate system and sensor faults without making any assumptions on faults.
3) A sufficient condition for the existence of fault-tolerant  formation consensus controllers is given, and a novel coupled backward recursive RDE method is proposed for time-varying systems with the stochastic parameter matrices.
formation consensus controllers is given, and a novel coupled backward recursive RDE method is proposed for time-varying systems with the stochastic parameter matrices.
The rest of this article is organized as follows. In Section II, some basic knowledge of graph theory, the discrete LTV MAS as well as the structures of observers and fault-tolerant formation consensus controllers are introduced, and the problem under the consideration is formulated. In Section III, the observer and controller parameters are obtained by solving backward recursive RDEs. Furthermore, a numerical illustrative example is given in Section IV to show the feasibility and effectiveness of the proposed controller design scheme. Finally, the conclusion is drawn in Section V.
Notations.  is the space of all real numbers.
is the space of all real numbers.  and
and  respectively represent the
respectively represent the  -dimensional Euclidean space and the set of all
-dimensional Euclidean space and the set of all  real matrices.
real matrices.  denotes the transpose of a matrix
denotes the transpose of a matrix  .
.  denotes the operation of Kronecker product.
denotes the operation of Kronecker product.  is the Hadamard product of matrices.
is the Hadamard product of matrices.  is the identity matrix with appropriate dimensions,
is the identity matrix with appropriate dimensions,  denotes the
denotes the  -dimensional identity matrix, and
-dimensional identity matrix, and  denotes a zero matrix with appropriate dimensions.
denotes a zero matrix with appropriate dimensions.  denotes an
denotes an  dimensional column vector with all ones. The superscript
dimensional column vector with all ones. The superscript  denotes Moore-Penrose pseudo inverse. diag
denotes Moore-Penrose pseudo inverse. diag  stands for a block-diagonal matrix whose diagonal elements are
stands for a block-diagonal matrix whose diagonal elements are  . The notation
. The notation  , where
, where  and
and  are real symmetric matrices, means that
are real symmetric matrices, means that  is positive definite. Prob
is positive definite. Prob  refers to the occurrence probability of the event
refers to the occurrence probability of the event  .
.  denotes the mathematical expectation of
denotes the mathematical expectation of  .
.  represents the Euclidean norm of
represents the Euclidean norm of  , and
, and  denotes the Frobenius norm of
denotes the Frobenius norm of  .
.  denotes the spectral radius of the square matrix
denotes the spectral radius of the square matrix  .
.  represents the Kronecker delta function with
represents the Kronecker delta function with  (if
(if  ) and
) and  (otherwise).
(otherwise).
2. Problem Formulation and Preliminaries
2.1. Graph Theory
The communication topology among the  agents is described by a weighted directed graph
agents is described by a weighted directed graph  , where
, where  represents the collection of nodes, and
represents the collection of nodes, and  represents the
represents the  -th node of the graph
-th node of the graph  . In the description of MASs, the nodes represent the location of agents. A directed edge
. In the description of MASs, the nodes represent the location of agents. A directed edge  means agent
means agent  can receive information from agent
can receive information from agent  , and
, and  means the set of directed edges, where
means the set of directed edges, where  .
.  denotes the weighted adjacency matrix, which consists of the non-negative elements
denotes the weighted adjacency matrix, which consists of the non-negative elements  satisfying
satisfying  . In this paper, self-edges are not allowed, which means
. In this paper, self-edges are not allowed, which means  and
and  for any
for any  .
.  means the neighborhood of agent
means the neighborhood of agent  .
.  is on behalf of the degree matrix with
is on behalf of the degree matrix with 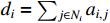 . The Laplacian matrix
. The Laplacian matrix  consists of the elements
consists of the elements  , and
, and  ,
,  for all
for all  .
.
2.2. Problem Formulation
Considering a MAS composed of  identical agents, in order to prevent data collisions, we assume that for agent
identical agents, in order to prevent data collisions, we assume that for agent  , only one neighboring agent
, only one neighboring agent  is allowed to transmit data to agent
is allowed to transmit data to agent  at each transmission instant. Let
at each transmission instant. Let  represent the neighboring agent which gets the opportunity to transmit data to the agent
represent the neighboring agent which gets the opportunity to transmit data to the agent  at time instant
at time instant  . As discussed in [43],
. As discussed in [43],  could be regarded as a sequence of random variables to represent the scheduling behavior of the SCP. All the random variables
could be regarded as a sequence of random variables to represent the scheduling behavior of the SCP. All the random variables  are mutually independent, and the probability of
are mutually independent, and the probability of  is
is

where  represents that agent
represents that agent  transmits data to agent
transmits data to agent  at time instant
at time instant  , and there has been a common assumption that
, and there has been a common assumption that  , and
, and  .
.
Remark 1: As discussed in extensive existing literature, the SCP is generally employed to determine which node has the priority of accessing to the communication networks at each transmission instant, which can effectively reduce the communication burden among sensors [44]. The probabilistic accesses of SCP have been identified as a set of random variables affecting the system performance [45]. For the considered SCP,  is a stochastic process, which can randomly generate the number from the set
is a stochastic process, which can randomly generate the number from the set  (e.g. the neighborhood of agent
(e.g. the neighborhood of agent  ) subject to the transition probability determined in (1).
) subject to the transition probability determined in (1).
Consider the following discrete LTV MAS defined on the finite horizon  and composed of
and composed of  agents, whose topology is a directed graph, and the dynamics of the
agents, whose topology is a directed graph, and the dynamics of the  -th agent is described by
-th agent is described by

where  ,
,  ,
,  ,
,  and
and  represent the system state, the measurement output, the control input, the fault and the control output respectively for the
represent the system state, the measurement output, the control input, the fault and the control output respectively for the  -th agent.
-th agent.  and
and  are external disturbances, respectively.
are external disturbances, respectively.  satisfies
satisfies  , where
, where  is a non-negative constant.
is a non-negative constant.  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  and
and  are known and time-varying matrices with appropriate dimensions.
are known and time-varying matrices with appropriate dimensions.
To facilitate the analysis of the problem, the following definitions are needed. Define the reference formation as a time-varying matrix  , which is assumed to be known. Subsequently, define formation error and formation consensus error for agent
, which is assumed to be known. Subsequently, define formation error and formation consensus error for agent  as
as  and
and  , respectively.
, respectively.
The premise of achieving fault-tolerant formation consensus control is to obtain the state and the fault information of the system. For the sake of the subsequent analysis, by defining  , system (2) can be rewritten as the following singular system:
, system (2) can be rewritten as the following singular system:

where  ,
,  ,
,  ,
,  . Assume that
. Assume that  is row full rank and
is row full rank and  is observable.
is observable.
In this article, the problem of finite-horizon formation consensus control is studied for the LTV MAS under SCP. In the objective system, exogenous disturbances, sensor and system faults are considered simultaneously. To deal with this problem, an observer is designed for each agent to obtain the system state and fault information, and a new distributed active FTC method is developed via adding a compensation term to alleviate the effects of system faults, time-varying parameters and external disturbances on the formation consensus among the agents. The following introduces the definition of achieving  formation consensus for MAS (2).
formation consensus for MAS (2).
Definition 1: Let a disturbance attenuation level  and a positive definite matrix
and a positive definite matrix  be given. Considering MAS (2) with a connected directed topology, if
be given. Considering MAS (2) with a connected directed topology, if

holds, then the MAS is said to satisfy the  consensus performance constraint over the finite horizon
consensus performance constraint over the finite horizon  , where
, where  , and
, and  represents the influence of faults, estimation errors and external disturbances on the formation consensus error system, and its definition will be given later.
represents the influence of faults, estimation errors and external disturbances on the formation consensus error system, and its definition will be given later.
2.3. State Observers Design
Assumption 1: At each transmission instant  in the finite horizon
in the finite horizon  , there exists
, there exists  that would make
that would make  holds.
holds.
In order to estimate the faults and system states simultaneously, a decentralized state observer is designed for system (3):

where  and
and  respectively denote the observer state and the estimation of augmented vector
respectively denote the observer state and the estimation of augmented vector  .
.  are the observer parameters that need to be computed, and there exists a sequence of matrices
are the observer parameters that need to be computed, and there exists a sequence of matrices  satisfying the following time-varying equations:
satisfying the following time-varying equations:




where Assumption 1 guarantees that equation (6) must have a non-zero solution  .
.
In this paper, the idea of active fault-tolerant scheme is employed to deal with formation consensus control problem, and the FTC scheme is shown in Figure 1. By utilizing the state and fault information obtained by the estimator, the fault-tolerant formation consensus controllers would be construct for the MAS to compensate for the influence of faults and exogenous disturbances.
Figure 1. Structure of fault-tolerant distributed formation consensus control scheme.
2.4. Formation Consensus Controllers Design
The core idea of the fault-tolerant controller design is to attenuate the influence of external disturbances and faults by adding the compensation term to the formation consensus controller. Under the SCP scheduling, the fault-tolerant formation consensus controller is designed as follows:

where  are the gain matrices to be determined,
are the gain matrices to be determined,  ,
,  ,
,  , and
, and  is the element in the
is the element in the  -th row and the
-th row and the  -th column of the weighted adjacency matrix
-th column of the weighted adjacency matrix  .
.
Defining estimation errors of augmented states  , other variables
, other variables

yields the following compact form of fault-tolerant controller (10):

where

Remark 2: Obviously,  is a stochastic parameter matrix whose value depends on the sequences
is a stochastic parameter matrix whose value depends on the sequences  . It can be seen that
. It can be seen that  indicates the
indicates the  -th row-sum of
-th row-sum of  . Bring the SCP in mind, if
. Bring the SCP in mind, if  is regarded as the element of the new adjacency matrix, then
is regarded as the element of the new adjacency matrix, then  acts as the adjacency matrix, and
acts as the adjacency matrix, and  indicates the degree matrix in this case.
indicates the degree matrix in this case.
To facilitate the subsequent analysis, a relationship between  and one random sequence
and one random sequence  is developed by mapping technique.
is developed by mapping technique.
Lemma 1: The random variable sequences 
 representing the scheduling behavior of SCP can be mapped to sequence
representing the scheduling behavior of SCP can be mapped to sequence 
 :
:

Moreover, if  is given, then the value of
is given, then the value of  can be obtained by
can be obtained by  :
:

Proof: By noting (12), it readily follows that, for sequence  calculated by (12),
calculated by (12),  holds. Below we continue the proof on that
holds. Below we continue the proof on that  can be acquired by (13). Since
can be acquired by (13). Since  holds for all
holds for all  , for any given
, for any given  , it follows
, it follows

It can be concluded that there is a one-to-one correspondence between the variable  and the vector
and the vector  . Hence, the peculiarity of
. Hence, the peculiarity of  is determined by the random sequences
is determined by the random sequences  .
.
Lemma 2: For any  , the occurrence probability of
, the occurrence probability of  is
is

Proof: Because  holds for all
holds for all  , and
, and  is a random variables with independent distribution according to the character of SCP, it yields (14) by noticing (1), where continued multiplication indicates intersection, that is
is a random variables with independent distribution according to the character of SCP, it yields (14) by noticing (1), where continued multiplication indicates intersection, that is  holds simultaneously for all
holds simultaneously for all  .
.
2.5. Closed-Loop System
The following lemma is presented before moving to next part.
Lemma 3: [46] For arbitrary matrices  and
and  , the row-sums of
, the row-sums of  are the diagonal elements of
are the diagonal elements of  , i.e.,
, i.e.,

For the sake of presentation, let us introduce some notations:

Then, the MAS (3) and the observers (5) can be respectively written in the following compact forms:

and

where  .
.
Subsequently, the estimation error system can be obtained by (10)
Substituting (6) into (17) and considering (3), it follows

Implementing (5), (7) and (8) into (18), we have

By defining variables  ,
,  , and
, and  , the following estimation error system is derived from (19):
, the following estimation error system is derived from (19):

One of the research objectives of this paper is to design the observer parameters  so that the estimation error
so that the estimation error  of the controlled output
of the controlled output  satisfies the
satisfies the  performance constraint defined below.
performance constraint defined below.
Definition 2: Let a disturbance attenuation level  and a positive definite matrix
and a positive definite matrix  be given. Considering LTV MAS (2), for any disturbance sequences
be given. Considering LTV MAS (2), for any disturbance sequences  , if the following inequality is satisfied, then the estimation error system (20) satisfies the
, if the following inequality is satisfied, then the estimation error system (20) satisfies the  consensus performance over the finite horizon
consensus performance over the finite horizon  :
:

where it can be known from the definition of  that
that  .
.
By denoting formation consensus error  , it can be inferred that
, it can be inferred that

where  . Subsequently, it readily follows that the formation consensus error system is
. Subsequently, it readily follows that the formation consensus error system is

Substituting the controller (11) into (22) yields

where  .
.
Then, (23) can be further written into

In terms of Lemma 3, the following equation can be obtained:

which means all the row-sums of  equal to 0. Therefore, it can be proved that the equation
equal to 0. Therefore, it can be proved that the equation  holds.
holds.
On the basis of (24), it can be inferred that

where  .
.
Subject to the distribution of  given by Lemma 2, one obtains
given by Lemma 2, one obtains

Define  , then (26) can also be equivalently expressed as
, then (26) can also be equivalently expressed as

where

Summarizing the aforementioned discussion, in this paper, we aim to deal with the problem of designing the controller gains  and
and  which can ensure that the
which can ensure that the  performance is achieved for formation consensus error
performance is achieved for formation consensus error  . The core idea is to attenuate the effect of unknown factors including estimation errors, faults, external disturbances and changing formation control targets on achieving formation consensus of MASs. Recalling the form of formation consensus error system (28), we treat
. The core idea is to attenuate the effect of unknown factors including estimation errors, faults, external disturbances and changing formation control targets on achieving formation consensus of MASs. Recalling the form of formation consensus error system (28), we treat  ,
,  and
and  as unknown disturbances, and then give the following definition:
as unknown disturbances, and then give the following definition:
Definition 3: For all possible realizations of the random sequence  , if inequality
, if inequality

holds over the finite horizon  , then
, then  formation consensus is achieved for time-varying MAS (2), where
formation consensus is achieved for time-varying MAS (2), where  ,
,  ,
,  . In virtue of the definition of
. In virtue of the definition of  in (4), we can get that
in (4), we can get that  , where
, where  .
.
3. Main Results
In this section, the design methods of observer and controller parameters are proposed.
3.1. Observer Parameters Design
Lemma 4: [47] Let  ,
,  , and
, and  be known nonzero matrices with appropriate dimensions. The solution
be known nonzero matrices with appropriate dimensions. The solution  to
to  is
is  .
.
Theorem 1: Consider time-varying MAS (3) with the decentralized state observer (5), and let the disturbance attenuation level  and the positive definite matrix
and the positive definite matrix  be given. Then, for any disturbance sequence
be given. Then, for any disturbance sequence  , the augmented state estimation error system (20) satisfies the
, the augmented state estimation error system (20) satisfies the  performance defined in (21) if there exist solutions
performance defined in (21) if there exist solutions  (with condition
(with condition  ) satisfying the recursive RDE:
) satisfying the recursive RDE:

subject to


Proof: Define  , then defining
, then defining  and considering (20) yields
and considering (20) yields

Adding the zero term  to the right side of (33), one obtains
to the right side of (33), one obtains

By applying the completing squares method, (34) can be converted into the following form:

where  .
.
Substituting (30) into (35) and summing up it from 0 to  with respect to
with respect to  yield
yield

Therefore, recalling (17), one obtains

Noticing condition (31), apparently, the augmented state estimation error system (20) satisfies the  performance in Definition 2.
performance in Definition 2.
Subsequently, to develop an approach to solve the observer parameter sequence  , we consider the worst situation, that is
, we consider the worst situation, that is  , where
, where  . Then, (20) can be converted into
. Then, (20) can be converted into

where  . Meanwhile, the following cost functional is constructed to represent the estimation effect of the observer:
. Meanwhile, the following cost functional is constructed to represent the estimation effect of the observer:

where  is typically a positive scalar.
is typically a positive scalar.
Theorem 2: Consider singular system (3) with observer (5), and let the disturbance attenuation level  , scalar
, scalar  and the positive definite matrix
and the positive definite matrix  be given. The state estimation error system (20) satisfies the
be given. The state estimation error system (20) satisfies the  performance requirement (14) if there exist solutions
performance requirement (14) if there exist solutions  (with condition
(with condition  ) satisfying the recursive RDEs (30) and the following one:
) satisfying the recursive RDEs (30) and the following one:

where  .
.
Moreover, the observer parameters  can be calculated by
can be calculated by

Proof: Based on Theorem 1, define the function as 
 . Combining with (38), it is easy to deduce that
. Combining with (38), it is easy to deduce that

Then, add zero term  to the right side of (42), and it can be further written into
to the right side of (42), and it can be further written into
It readily follows that, based on completing squares method, (43) is equivalent to

where  .
.
Substituting (40) into (44) and summing up it from 0 to  , it follows
, it follows

Noticing the cost function (39), it follows that

Recalling the definitions of  and
and  , one obtains
, one obtains

Apparently, the observer gain  should make the cost function
should make the cost function  as small as possible. A method of calculating
as small as possible. A method of calculating  is given below.
is given below.
Denoting  ,
,  and considering (41), it can be found that
and considering (41), it can be found that
In light of Lemma 4,  can be obtained from the following equation:
can be obtained from the following equation:

which is the solution of the optimization problem (41). Recalling Theorem 1, (20) satisfies the  performance (14) under the influence of designed
performance (14) under the influence of designed  , and the proof is complete.
, and the proof is complete.
So far, we have designed the observer (5) for the augmented singular system (3), and given the conditions to ensure that the augmented estimation error achieves the  performance given in Definition 2, thus the simultaneous estimation of state and fault vectors is realized. Considering the SCP, based on the above work, the following will deal with the problem of designing controller parameters for the fault-tolerant formation consensus controller as shown in (48).
performance given in Definition 2, thus the simultaneous estimation of state and fault vectors is realized. Considering the SCP, based on the above work, the following will deal with the problem of designing controller parameters for the fault-tolerant formation consensus controller as shown in (48).
3.2. Controller Parameters Design
Theorem 3: Consider MAS (3) with the observer (5) and the fault-tolerant controller (10), and let the disturbance attenuation level  , the scalar
, the scalar  and the positive definite matrix
and the positive definite matrix  be given. The time-varying system (28) satisfies the
be given. The time-varying system (28) satisfies the  performance requirement (29) if there exist solutions
performance requirement (29) if there exist solutions  (with condition
(with condition  ) satisfying (30) and the following recursive RDE:
) satisfying (30) and the following recursive RDE:

subject to





where
Proof: Define  and calculate the expectation of
and calculate the expectation of  as follows:
as follows:
Then (55) can be further written into

Adding the zero term  to (56), it follows
to (56), it follows
Applying the completing squares method, one obtains

where

Noticing (49), it follows from (29) that

Noticing the definition of  , it can be inferred that
, it can be inferred that

Owing to the condition (54), we have  , which is equivalent to
, which is equivalent to  . Since
. Since  , it readily follows that
, it readily follows that  , which indicates that
, which indicates that  . Therefore, under the condition of (53), the
. Therefore, under the condition of (53), the  performance constraint defined by (29) is satisfied over the finite horizon
performance constraint defined by (29) is satisfied over the finite horizon  . A sufficient condition is established for time-varying MAS (2) achieving formation consensus, and the proof is complete.
. A sufficient condition is established for time-varying MAS (2) achieving formation consensus, and the proof is complete.
Remark 3: Both  and
and  are
are  performance constraints over the finite horizon
performance constraints over the finite horizon  , the difference being that they are designed for different systems. Specifically, if
, the difference being that they are designed for different systems. Specifically, if  , then the augmented state estimation error system (20) satisfies the
, then the augmented state estimation error system (20) satisfies the  performance constraint. If
performance constraint. If  , the formation consensus error system (28) satisfies the
, the formation consensus error system (28) satisfies the  performance constraint, which is equivalent to MAS achieving fault-tolerant
performance constraint, which is equivalent to MAS achieving fault-tolerant  formation consensus control. Therefore,
formation consensus control. Therefore,  is used to prove Theorem 1 for solving the time-varying parameter matrices
is used to prove Theorem 1 for solving the time-varying parameter matrices  of the state observer (16). And
of the state observer (16). And  is used to prove Theorem 3 for solving
is used to prove Theorem 3 for solving  of the fault-tolerant controller (11).
of the fault-tolerant controller (11).
In Theorem 3, we discuss the condition that the formation consensus error system (28) satisfies the  performance by resorting to backward recursive RDEs. In order to give a solution to the controller gain
performance by resorting to backward recursive RDEs. In order to give a solution to the controller gain  , rewrite (28) as follows:
, rewrite (28) as follows:

where  ,
,  ,
,  . Consider the particular case, that is, specifying
. Consider the particular case, that is, specifying  has a special form
has a special form  , where
, where  .
.
Subsequently, from (61), the formation consensus error system in this case can be obtained:

where  ,
,  ,
,  ,
,  .
.
Define the following cost functional:

where  represents the control performance,
represents the control performance,  stands for the control effort, and scalar
stands for the control effort, and scalar  is selected according to special needs.
is selected according to special needs.
Theorem 4: Consider MAS (3) with the observer (5) and controller (10), and let the disturbance attenuation level  , the scalar
, the scalar  and the positive definite matrix
and the positive definite matrix  be given. The MAS achieves formation consensus if there exist solutions
be given. The MAS achieves formation consensus if there exist solutions  [with condition
[with condition  ] satisfying (30), (49) and the following recursive RDE:
] satisfying (30), (49) and the following recursive RDE:

subject to

where

Besides, the controller gain can be obtained by the following equation:

Proof: Similar to the proof process of Theorem 2, we define 
 based on Theorem 3, and recalling (62) yields
based on Theorem 3, and recalling (62) yields
Noticing the definitions of  and
and  , add the zero term
, add the zero term 
 to (67), then it can be equivalently expressed as
to (67), then it can be equivalently expressed as

where  .
.
Subsequently, it follows from (64) and the cost functional (63) that

According to the definition of cost functional in (63), the controller gain  obtained by (66) is the best choice to suppress
obtained by (66) is the best choice to suppress  . Considering that
. Considering that  has a special structure, similar to the calculation method of observer gain
has a special structure, similar to the calculation method of observer gain  , we introduce the notation
, we introduce the notation

It readily follows from Lemma 4 that  can be obtained by
can be obtained by

Recalling Theorem 3, it can be seen that under the effect of fault-tolerant controller (11), the MAS can achieve the formation consensus defined in Definition 3.
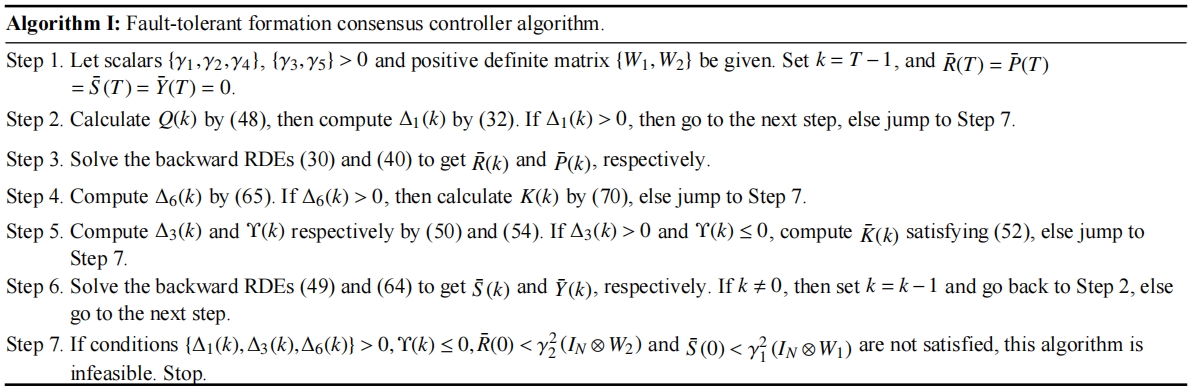
Based on the above analysis, the finite-horizon fault-tolerant formation consensus control design algorithm can be summarized.
4. Illustrative Example
In this section, a numerical example is provided to validate the effectiveness of the developed scheme of distributed  fault-tolerant formation consensus controller design. Consider a time-varying MAS that consists of five agents, and the dynamics of agents are modelled as (2) with following parameters:
fault-tolerant formation consensus controller design. Consider a time-varying MAS that consists of five agents, and the dynamics of agents are modelled as (2) with following parameters:

In the simulation, it is assumed that the topology of MAS is denoted by a directed graph  shown in Figure 2 with all the edge weight as 1. Assume that the following faults occur simultaneously on agents 1 and 3:
shown in Figure 2 with all the edge weight as 1. Assume that the following faults occur simultaneously on agents 1 and 3:

The disturbance input  are respectively selected as
are respectively selected as  and
and  , where
, where  are sequences which obey uniform distribution over
are sequences which obey uniform distribution over  . In this simulation example, we set the time horizon
. In this simulation example, we set the time horizon  , scalars
, scalars  ,
,  ,
,  ,
,  ,
,  , and positive definite matrices
, and positive definite matrices  , and the initial values
, and the initial values  is chosen as
is chosen as  . Specify the reference formation matrix by
. Specify the reference formation matrix by  . Assume that the probability
. Assume that the probability  of agent
of agent  transmitting data to agent
transmitting data to agent  at the discrete time
at the discrete time  is shown in Table 1. In accordance with Algorithm 1, the observer and controller parameters
is shown in Table 1. In accordance with Algorithm 1, the observer and controller parameters  are respectively listed in Table 2.
are respectively listed in Table 2.
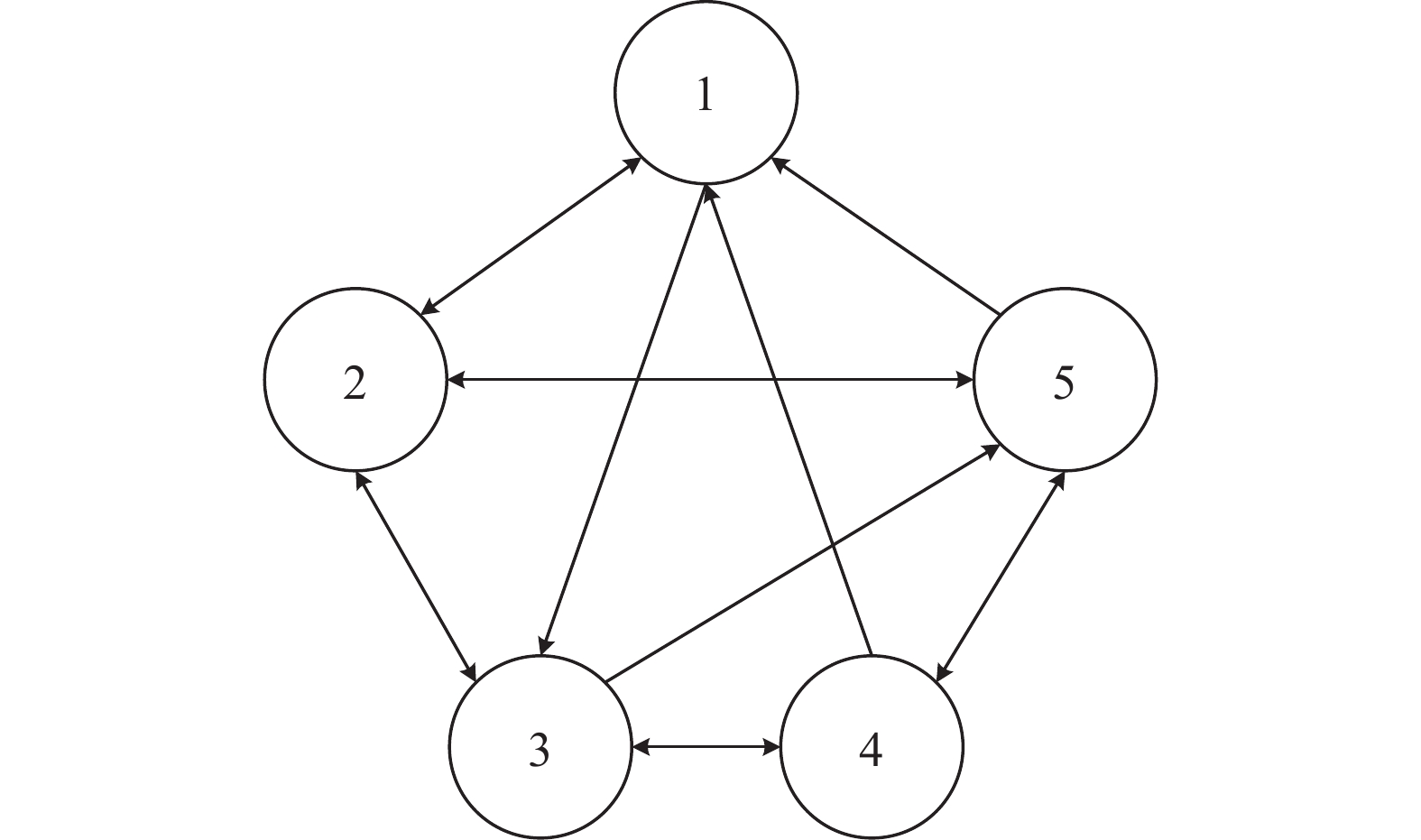
Figure 2. Directed communication graph .
.
Table 1. The probability of transmitting data between agents
 |
 |
 |
 |
 |
 |
 |
0 | 0.4 | 0.6 | 0 | 0 |
 |
0.5 | 0 | 0.5 | 0 | 0 |
 |
0 | 0.4 | 0 | 0.3 | 0.3 |
 |
0.4 | 0 | 0.3 | 0 | 0.3 |
 |
0.2 | 0.3 | 0 | 0.5 | 0 |
Table 2. Observer and controller parameters
 |
1 | 2 | 3 | 4 | 5 |  |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
The simulation results are presented in Figures 3-8, where the red dash dotted lines indicate the discrete time when faults occur, i.e.,  . The state estimation errors
. The state estimation errors  are shown in Figure 3, where
are shown in Figure 3, where  and
and  represent two first-order components of
represent two first-order components of  , respectively. And Figure 4 depicts the faults
, respectively. And Figure 4 depicts the faults  , and the fault estimations
, and the fault estimations  . In order to demonstrate the effectiveness of the proposed fault-tolerant formation consensus controller (11), we compare it with the formation consensus controller without the time-varying fault compensation term, i.e.,
. In order to demonstrate the effectiveness of the proposed fault-tolerant formation consensus controller (11), we compare it with the formation consensus controller without the time-varying fault compensation term, i.e.,
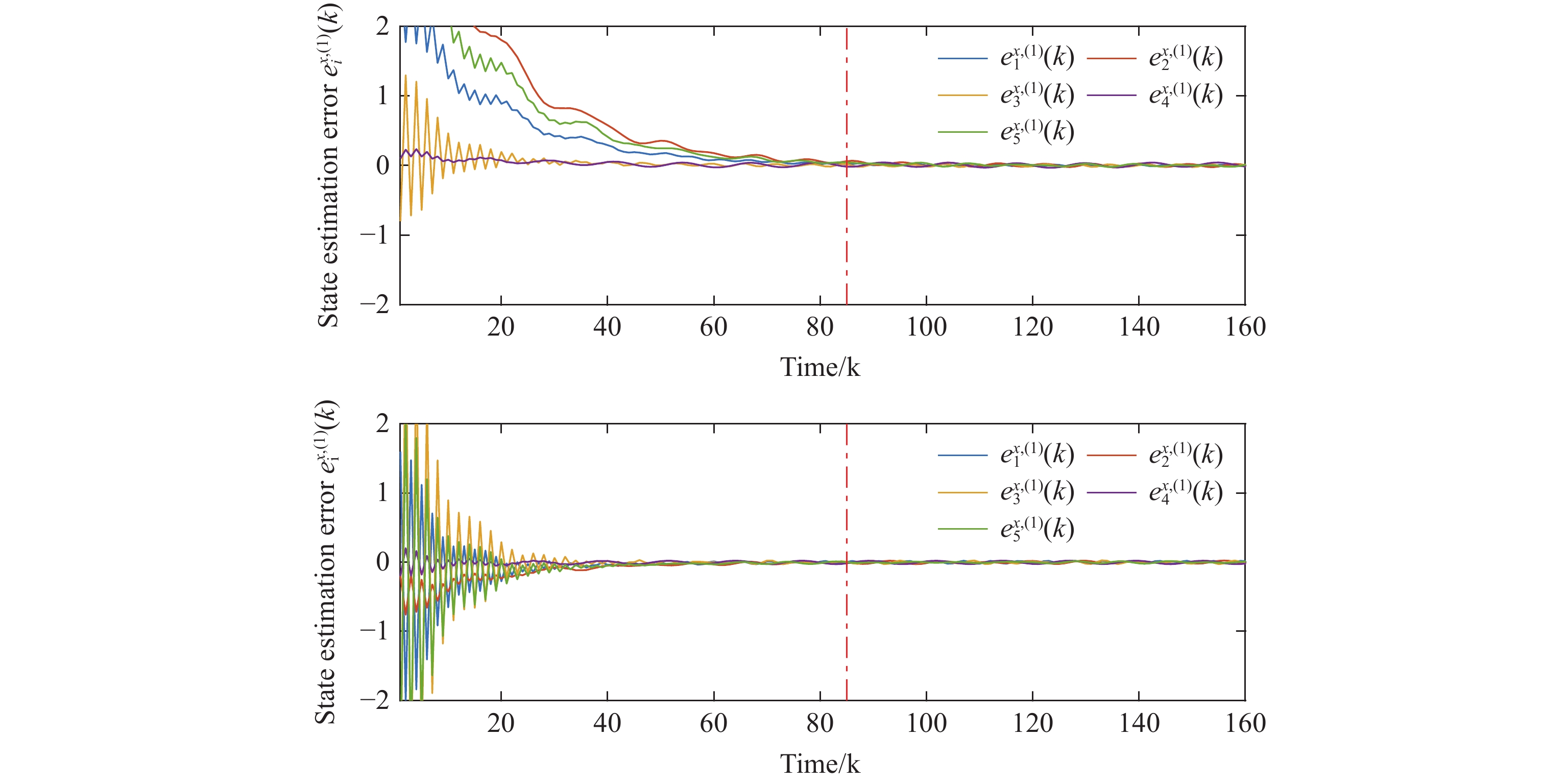
Figure 3. State estimation error (upside) and
(upside) and (downside),
(downside), .
.

and the state trajectories  of agents by using the developed controller
of agents by using the developed controller  given by (11) and
given by (11) and  are shown in Figures 5 and 6.
are shown in Figures 5 and 6.
Obviously, when  , both
, both  and
and  can make MAS achieve the formation consensus control well. Moreover, the corresponding formation consensus errors
can make MAS achieve the formation consensus control well. Moreover, the corresponding formation consensus errors  are depicted by Figures 7 and 8, which clearly reveal that, the proposed fault-tolerant controller (11), compared with the one without time-varying fault compensation term, can significantly suppress the effect of the faults on
are depicted by Figures 7 and 8, which clearly reveal that, the proposed fault-tolerant controller (11), compared with the one without time-varying fault compensation term, can significantly suppress the effect of the faults on  formation consensus. It can be seen that the simulation results verify the validity and feasibility of the proposed fault-tolerant
formation consensus. It can be seen that the simulation results verify the validity and feasibility of the proposed fault-tolerant  control scheme.
control scheme.
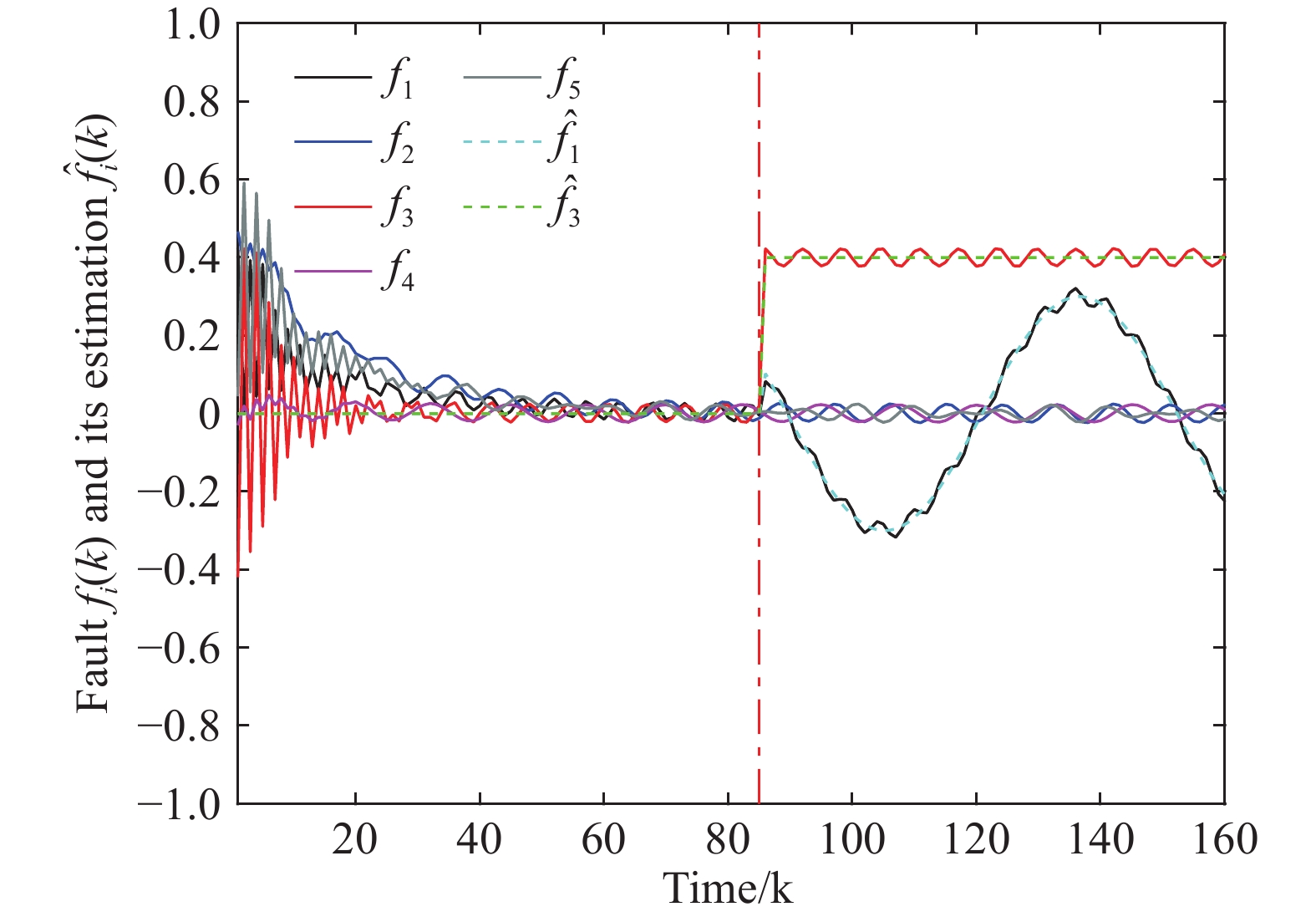
Figure 4. Fault , and its estimation
, and its estimation .
.
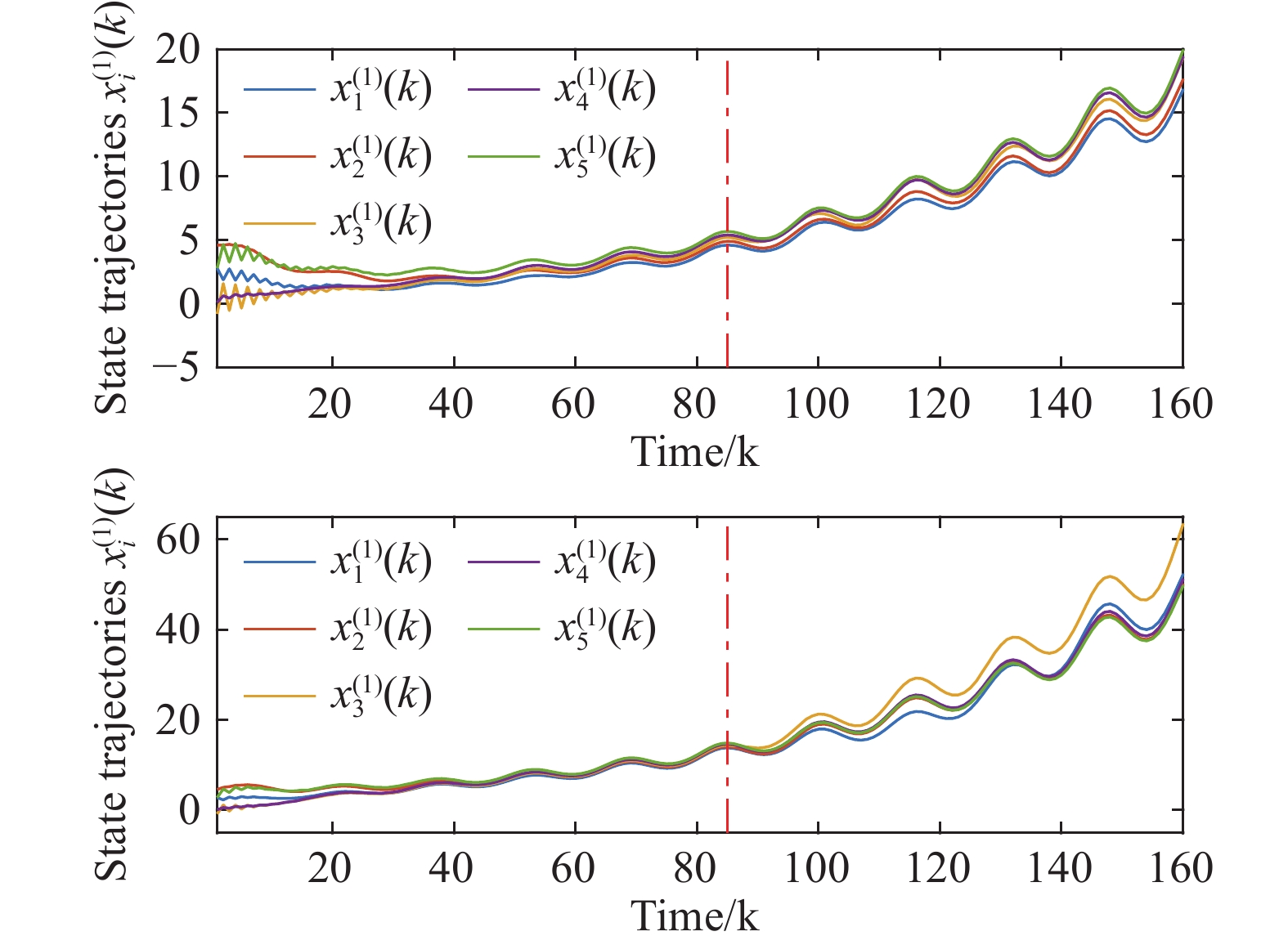
Figure 5. State trajectories , with
, with (upside) and
(upside) and (downside).
(downside).
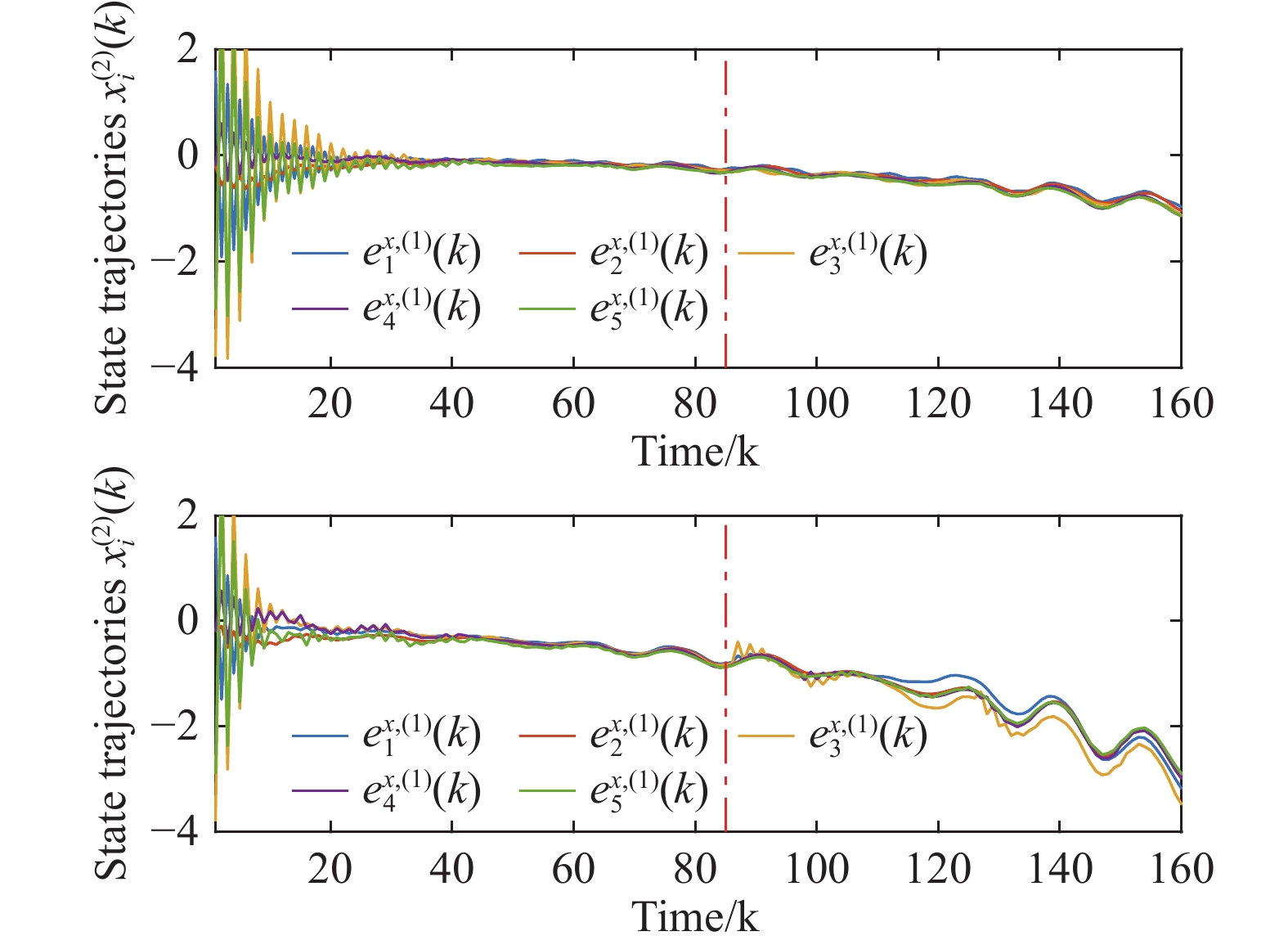
Figure 6. State trajectories , with
, with (upside) and
(upside) and (downside).
(downside).
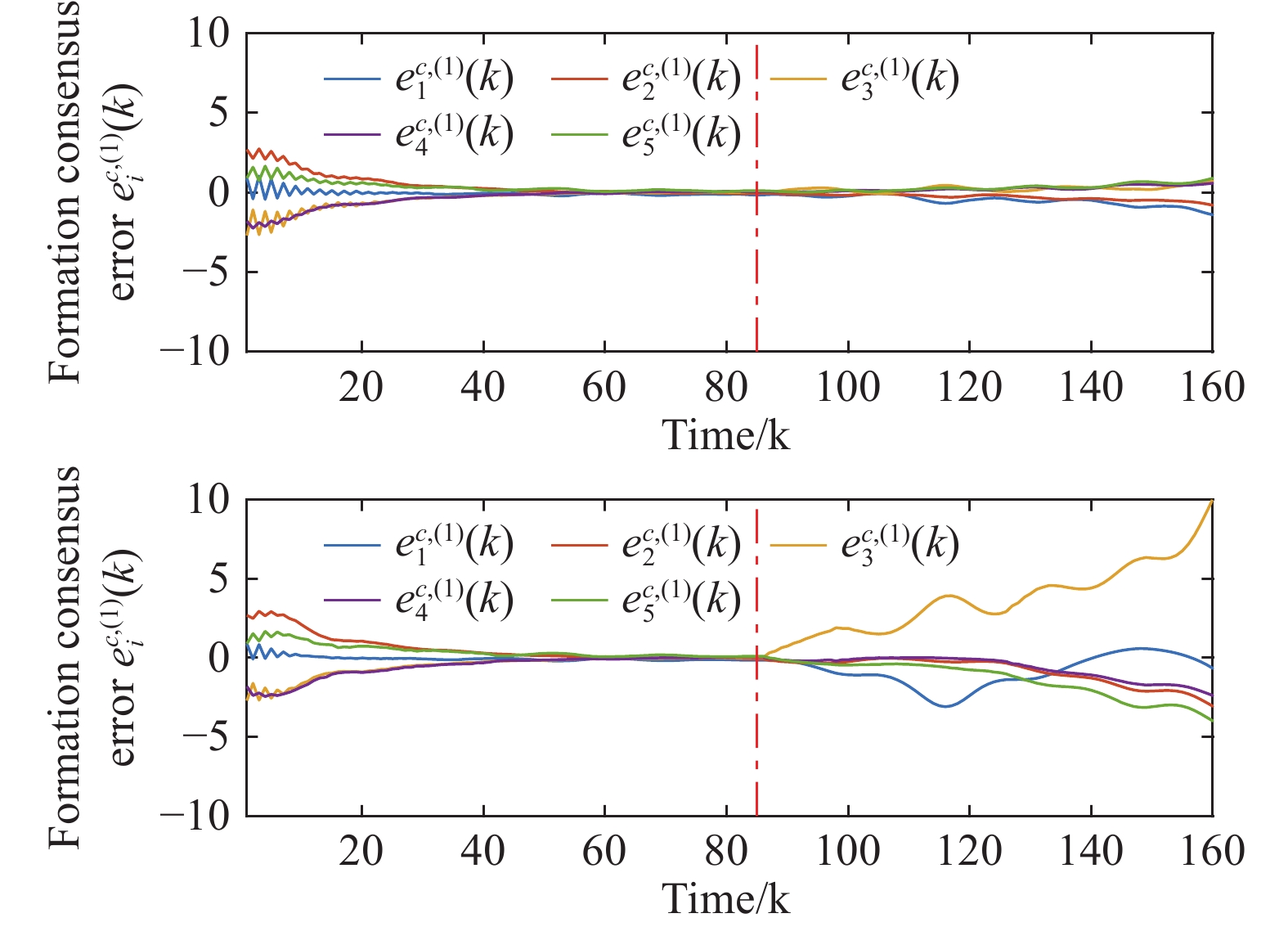
Figure 7. Formation consensus error , with
, with (upside) and
(upside) and (downside).
(downside).
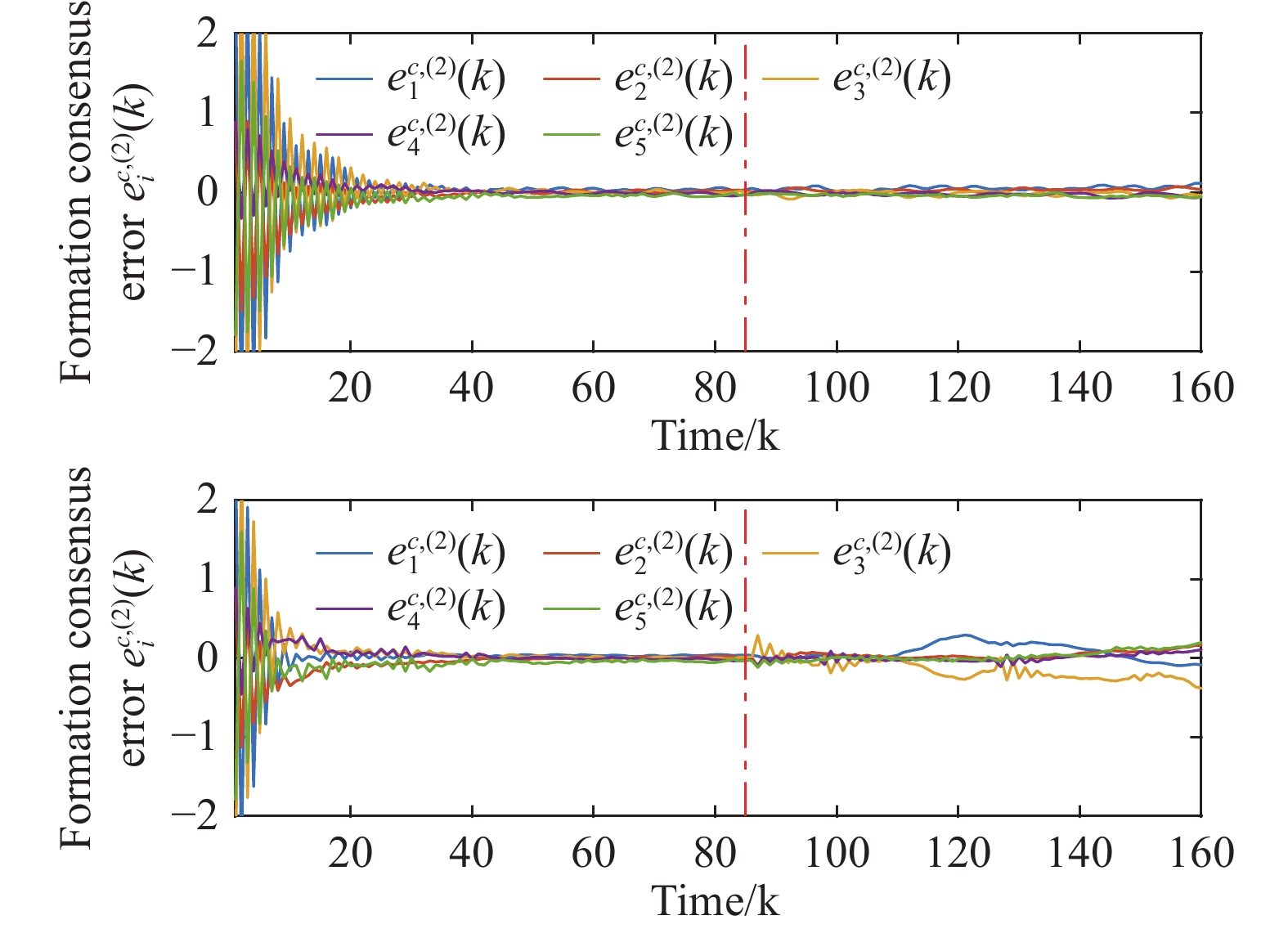
Figure 8. Formation consensus error , with
, with (upside) and
(upside) and (downside).
(downside).
5. Conclusions
In this paper, the problem of finite-horizon fault-tolerant distributed formation consensus control has been addressed for a LTV MAS with SCP. To this end, a singular system has been constructed by augmenting the state and fault of the system into a new vector, and a decentralized observer has been designed. A sufficient condition for the existence of observers has been given to ensure that the state estimation error system satisfies the given  performance constraint. By resorting to describing the scheduling behavior of the SCP by a stochastic variable sequence, the closed-loop MAS has been modeled as a time-varying system with stochastic parameter matrices. Utilizing the obtained state and fault information, fault-tolerant distributed formation consensus controllers have been constructed, which can suppress the adverse effects mainly induced by faults and external disturbances. In addition, a sufficient condition has been given to ensure that the MAS achieves formation consensus, and the parameters of the controller have been obtained by solving two coupled backward recursive RDEs. Finally, an illustrative example has been presented to validate the feasibility and effectiveness of the developed methods.
performance constraint. By resorting to describing the scheduling behavior of the SCP by a stochastic variable sequence, the closed-loop MAS has been modeled as a time-varying system with stochastic parameter matrices. Utilizing the obtained state and fault information, fault-tolerant distributed formation consensus controllers have been constructed, which can suppress the adverse effects mainly induced by faults and external disturbances. In addition, a sufficient condition has been given to ensure that the MAS achieves formation consensus, and the parameters of the controller have been obtained by solving two coupled backward recursive RDEs. Finally, an illustrative example has been presented to validate the feasibility and effectiveness of the developed methods.
Author Contributions: Chunyu Li: Draft writing, conceptualization, methodology, simulation. Yifan Liu: Investi-gation, simulation. Ming Gao: Supervision, review & editing. Li Sheng: Funding acquisition, review & editing, supervision.
Funding: This work was supported in part by the National Natural Science Foundation of China under Grant 62073339, Grant 62173343, and Grant 62033008; in part by the Natural Science Foundation of Shandong Province of China under Grant ZR2022ZD34; and in part by the Research Fund for the Taishan Scholar Project of Shandong Province of China.
Data Availability Statement: Not applicable.
Conflicts of Interest: The authors declare no conflict of interest.

References
- Cheng, P.D.C.; Indri, M.; Possieri, C.; et al. Path planning in formation and collision avoidance for multi-agent systems. Nonlinear Anal. Hybrid Syst., 2023, 47: 101293. doi: 10.1016/j.nahs.2022.101293
- Xu, B.W.; Zhang, H.T.; Ding, Y.; et al. Event-triggered surrounding formation control of multiagent systems for multiple dynamic targets. IEEE Trans. Control Netw. Syst., 2023, 10: 752−764. doi: 10.1109/TCNS.2022.3210291
- Su, Y.F.; Cai, H.; Huang, J. The cooperative output regulation by the distributed observer approach. Int. J. Netw. Dyn. Intell., 2022, 1: 20−35. doi: 10.53941/ijndi0101003
- Yan, B.; Shi, P.; Lim, C.C.; et al. Robust formation control for multiagent systems based on adaptive observers. IEEE Syst. J., 2022, 16: 3139−3150. doi: 10.1109/JSYST.2021.3127579
- Wu, J.F.; Wang, H.L.; Li, N.; et al. Formation obstacle avoidance: A fluid-based solution. IEEE Syst. J., 2020, 14: 1479−1490. doi: 10.1109/JSYST.2019.2917786
- Liu, M.C.; Li, Y.D.; Zhu, L.; et al. Formation control for mixed-order UAVs-USVs-UUVs systems under cooperative and optimal control. J. Mar. Sci. Eng., 2023, 11: 704. doi: 10.3390/jmse11040704
- Shi, P.; Yan, B. A survey on intelligent control for multiagent systems. IEEE Trans. Syst., Man, Cybern.: Syst., 2021, 51: 161−175. doi: 10.1109/TSMC.2020.3042823
- Ma, L.F.; Wang, Z.D.; Chen, Y.; et al. Probability-guaranteed distributed filtering for nonlinear systems with innovation constraints over sensor networks. IEEE Trans. Control Netw. Syst., 2021, 8: 951−963. doi: 10.1109/TCNS.2021.3049361
- Niu, Y.C.; Sheng, L.; Gao, M.; Zhou, D.H. Distributed intermittent fault detection for linear stochastic systems over sensor network. IEEE Trans. Cybern., 2022, 52: 9208−9218. doi: 10.1109/TCYB.2021.3054123
- Luo, Y.Q.; Wang, Z.D.; Hu, J.; et al. Security-guaranteed fuzzy networked state estimation for 2-D systems with multiple sensor arrays subject to deception attacks. IEEE Trans. Fuzzy Syst., 2023, 31: 3624−3638. doi: 10.1109/TFUZZ.2023.3262609
- Sheng, L.; Zhang, S.; Gao, M. Intermittent fault detection for linear discrete-time stochastic multi-agent systems. Appl. Math. Comput., 2021, 410: 126480. doi: 10.1016/j.amc.2021.126480
- Shakiba, F.M.; Shojaee, M.; Azizi, S.M.; et al. Real-time sensing and fault diagnosis for transmission lines. Int. J. Netw. Dyn. Intell., 2022, 1: 36−47. doi: 10.53941/ijndi0101004
- Amin, A.A.; Hasan, K.M. A review of fault tolerant control systems: Advancements and applications. Measurement, 2019, 143: 58−68. doi: 10.1016/j.measurement.2019.04.083
- Sheng, L.; Niu, Y.C.; Gao, M.; et al. Particle filter-based fault detection for Toolface measurement of rotary steerable systems. IEEE Trans. Instrum. Meas., 2023, 72: 3519511. doi: 10.1109/TIM.2023.3284049
- Hu, Q.; Xiao, B.; Friswell, M.I. Robust fault-tolerant control for spacecraft attitude stabilisation subject to input saturation. IET Control Theory Appl., 2011, 5: 271−282. doi: 10.1049/iet-cta.2009.0628
- Wang, Q.; Dong, X.W.; Wang, B.H.; et al. Finite-time observer-based H∞ fault-tolerant output formation tracking control for heterogeneous nonlinear multi-agent systems. IEEE Trans. Netw. Sci. Eng., 2023, 10: 1822−1834. doi: 10.1109/TNSE.2023.3235527
- Nair, R.R.; Karki, H.; Shukla, A.; et al. Fault-tolerant formation control of nonholonomic robots using fast adaptive gain nonsingular terminal sliding mode control. IEEE Syst. J., 2019, 13: 1006−1017. doi: 10.1109/JSYST.2018.2794418
- Deng, C.; Che, W.W. Fault-tolerant fuzzy formation control for a class of nonlinear multiagent systems under directed and switching topology. IEEE Trans. Syst., Man, Cybern.: Syst., 2021, 51: 5456−5465. doi: 10.1109/TSMC.2019.2954870
- Liu, C.; Jiang, B.; Zhang, K. Adaptive fault-tolerant H-infinity output feedback control for Lead-Wing close formation flight. IEEE Trans. Syst., Man, Cybern.: Syst., 2020, 50: 2804−2814. doi: 10.1109/TSMC.2018.2830511
- Liu, C.; Jiang, B.; Patton, R.J.; et al. Integrated fault-tolerant control for close formation flight. IEEE Trans. Aerosp. Electron. Syst., 2020, 56: 839−852. doi: 10.1109/TAES.2019.2920221
- Ji, W.Y.; Pan, Y.N.; Zhao, M. Adaptive fault-tolerant optimized formation control for perturbed nonlinear multiagent systems. Int. J. Robust Nonlinear Control, 2022, 32: 3386−3407. doi: 10.1002/rnc.5961
- Yu, Z.Q.; Zhang, Y.M.; Jiang, B.; et al. Distributed fractional-order intelligent adaptive fault-tolerant formation-containment control of two-layer networked unmanned airships for safe observation of a smart city. IEEE Trans. Cybern., 2022, 52: 9132−9144. doi: 10.1109/TCYB.2021.3052875
- Liu, D.Y.; Liu, H.; Lewis, F.L.; et al. Robust fault-tolerant formation control for tail-sitters in aggressive flight mode transitions. IEEE Trans. Ind. Inf., 2020, 16: 299−308. doi: 10.1109/TII.2019.2914478
- Wang, H.Q.; Dong, J.X. Time-varying formation control for multi-agent systems under directed topology base on gain re-adaptation fault-tolerant compensation approach. Int. J. Robust Nonlinear Control, 2022, 32: 3909−3922. doi: 10.1002/rnc.6007
- Liu, Y.S.; Dong, X.W.; Shi, P.F.; et al. Distributed fault-tolerant formation tracking control for multiagent systems with multiple leaders and constrained actuators. IEEE Trans. Cybern., 2023, 53: 3738−3747. doi: 10.1109/TCYB.2022.3141734
- Ren, Y.; Zhang, K.; Jiang, B.; et al. Distributed fault-tolerant time-varying formation control of heterogeneous multi-agent systems. Int. J. Robust Nonlinear Control, 2022, 32: 2864−2882. doi: 10.1002/rnc.5870
- Jiang, J.H.; Jiang, Y.Y. Leader-following consensus of linear time-varying multi-agent systems under fixed and switching topologies. Automatica, 2020, 113: 108804. doi: 10.1016/j.automatica.2020.108804
- Li, H.Y.; Li, X. Distributed model predictive consensus of heterogeneous time-varying multi-agent systems: With and without self-triggered mechanism. IEEE Trans. Circuits Syst. I:Regul. Pap., 2020, 67: 5358−5368. doi: 10.1109/TCSI.2020.3008528
- Li, H.Y.; Li, X. Distributed consensus of heterogeneous linear time-varying systems on UAVS-USVs coordination. IEEE Trans. Circuits Syst. II:Express Briefs, 2020, 67: 1264−1268. doi: 10.1109/TCSII.2019.2928870
- Chen, Y.Z.; Huang, X.L.; Zhan, J.Y. Gain-scheduled robust control for multi-agent linear parameter-varying systems with communication delays. Int. J. Robust Nonlinear Control, 2022, 32: 792−806. doi: 10.1002/rnc.5854
- Cai, Y.L.; Zhang, H.G.; Zhang, K.; et al. Distributed leader-following consensus of heterogeneous second-order time-varying nonlinear multi-agent systems under directed switching topology. Neurocomputing, 2019, 325: 31−47. doi: 10.1016/j.neucom.2018.09.068
- Chen, J.X.; Li, J.M.; Yang, N.N. Globally repetitive learning consensus control of unknown nonlinear multi-agent systems with uncertain time-varying parameters. Appl. Math. Modell., 2021, 89: 348−362. doi: 10.1016/j.apm.2020.07.063
- Zeng, Z.X.; Peng, S.G.; Feng, W.D. Quasi-consensus of time-varying multi-agent systems with external inputs under deception attacks. Entropy, 2022, 24: 447. doi: 10.3390/e24040447
- Chen, J.X.; Yu, Z.H.; Liu, S.Y.; et al. Fully distributed neural control of periodically time-varying parameterized stochastic nonlinear multi-agent systems with hybrid-order dynamics. Appl. Math. Comput., 2022, 426: 127117. doi: 10.1016/j.amc.2022.127117
- Liu, J.H.; Wang, C.L.; Xu, Y.J. Distributed adaptive output consensus tracking for high-order nonlinear time-varying multi-agent systems with output constraints and actuator faults. J. Franklin Inst., 2020, 357: 1090−1117. doi: 10.1016/j.jfranklin.2019.12.015
- Liu, L.; Sun, H.; Ma, L.F.; et al. Quasi-consensus control for a class of time-varying stochastic nonlinear time-delay multiagent systems subject to deception attacks. IEEE Trans. Syst., Man, Cybern.: Syst., 2021, 51: 6863−6873. doi: 10.1109/TSMC.2020.2964826
- Geng, H.; Wang, Z.D.; Chen, Y.; et al. Variance-constrained filtering fusion for nonlinear cyber-physical systems with the denial-of-service attacks and stochastic communication protocol. IEEE/CAA J. Autom. Sin., 2022, 9: 978−989. doi: 10.1109/JAS.2022.105623
- Zou, L.; Wang, Z.D.; Hu, J.; et al. Communication-protocol-based analysis and synthesis of networked systems: Progress, prospects and challenges. Int. J. Syst. Sci., 2021, 52: 3013−3034. doi: 10.1080/00207721.2021.1917721
- Zhao, Z.Y.; Wang, Z.D.; Zou, L.; et al. Zonotopic multi-sensor fusion estimation with mixed delays under try-once-discard protocol: A set-membership framework. Inf. Fusion, 2023, 91: 681−693. doi: 10.1016/j.inffus.2022.11.012
- Luo, Y.Q.; Wang, Z.D.; Chen, Y.; et al. H∞ state estimation for coupled stochastic complex networks with periodical communication protocol and intermittent nonlinearity switching. IEEE Trans. Netw. Sci. Eng., 2021, 8: 1414−1425. doi: 10.1109/TNSE.2021.3058220
- Luo, Y.Q.; Wang, Z.D.; Sheng, W.G.; et al. State estimation for discrete time-delayed impulsive neural networks under communication constraints: A delay-range-dependent approach. IEEE Trans. Neural Netw. Learn. Syst., 2023, 34: 1489−1501. doi: 10.1109/TNNLS.2021.3105449
- Wang, X.L.; Sun, Y.; Ding, D.R. Adaptive dynamic programming for networked control systems under communication constraints: A survey of trends and techniques. Int. J. Netw. Dyn. Intell., 2022, 1: 85−98. doi: 10.53941/ijndi0101008
- Tabbara, M.; Nesic, D. Input-output stability of networked control systems with stochastic protocols and channels. IEEE Trans. Autom. Control, 2008, 53: 1160−1175. doi: 10.1109/TAC.2008.923691
- Zhu, K.Q.; Hu, J.; Liu, Y.R.; et al. On ℓ2-ℓ∞ output-feedback control scheduled by stochastic communication protocol for two-dimensional switched systems. Int. J. Syst. Sci., 2021, 52: 2961−2976. doi: 10.1080/00207721.2021.1914768
- Cheng, J.; Yan, H.C.; Park, J.H.; et al. Output-feedback control for fuzzy singularly perturbed systems: A nonhomogeneous stochastic communication protocol approach. IEEE Trans. Cybern., 2023, 53: 76−87. doi: 10.1109/TCYB.2021.3089612
- Styan, G.P.H. Hadamard products and multivariate statistical analysis. Linear Algebra Appl., 1973, 6: 217−240. doi: 10.1016/0024-3795(73)90023-2
- Penrose, R. On best approximate solutions of linear matrix equations. Math. Proc. Cambridge Philos. Soc., 1956, 52: 17−19. doi: 10.1017/S0305004100030929


