
Downloads
 Download
Download






This work is licensed under a Creative Commons Attribution 4.0 International License.
Survey/review study
A Survey on Recent Advances in Distributed Filtering over Sensor Networks Subject to Communication Constraints
Yu-Ang Wang 1,2, Bo Shen 1,2, Lei Zou 1,2, and Qing-Long Han 3,*
1 College of Information Science and Technology, Donghua University, Shanghai 201620, China
2 Engineering Research Center of Digitalized Textile and Fashion Technology, Ministry of Education, Shanghai 201620, China
3 School of Science, Computing and Engineering Technologies, Swinburne University of Technology, Melbourne, VIC 3122, Australia
* Correspondence: qhan@swin.edu.au
Received: 13 December 2022
Accepted: 31 January 2023
Published: 23 June 2023
Abstract: The sensor network (SN) has long been an ongoing research topic with many successful applications in a wide range of fields. Lying in the core part of this paper is the distributed filtering problem over SNs that has been gaining growing research interests. We aim to provide a timely survey on recent advances in the distributed filtering problems over SNs subject to communication constraints. First, some basic knowledge concerning the distributed filter design issue is provided in terms of background introduction and mathematical descriptions. Then, some frequently encountered network-induced complexities resulting from communication constraints are comprehensively reviewed. Subsequently, the latest research progress of the distributed filtering schemes is discussed in detail for various systems over SNs with different performance specifications. Furthermore, practical applications of the distributed filtering methods are presented that include target tracking and distributed generation. Finally, concluding remarks are given followed by possible future research directions.
Keywords:
sensor networks distributed filtering network-induced phenomena communication proto-cols1. Introduction
Owing to the rapid advancement of wireless communication technologies, sensor networks (SNs) have attracted ever-increasing research attention with widespread applications in a variety of areas such as health care, environment monitoring, power grids, transportation networks, and intelligent manufacturing. In general, a typical SN is comprised of numerous sensor nodes geographically distributed and coupled over certain monitored regions. Each sensor possesses sensing, computing, and wireless communication capabilities to share the local information with the neighboring network nodes, thereby achieving the desired tasks in a collaborative way [1-3]. In the context of SNs, a fundamental issue is the attainment of reliable state estimates of the target plants based on available yet possibly contaminated measurements. To date, the state estimation or filtering problems over SNs have received steadily growing research interests [4-8].
It is worth mentioning that the filtering schemes over SNs can be generally categorized into the centralized method and distributed method according to the filter structures. Particularly, when a fusion centre is available, each individual sensor will send its own measurement to the remote fusion centre via communication networks, and then the centralized filtering algorithm is carried out in the central unit to attain the state estimate from the measurements collected by all sensor nodes. The structure of the centralized estimation with a fusion centre is presented in Figure 1. Although the centralized filtering strategy is capable of providing the globally optimal state estimate, it is rather challenging to establish the centralized filtering algorithm because of the following substantial difficulties: the timely yet efficient communication among sensors is hard to be realized and the computational burden would be quite huge, which is especially true for large-scale SNs.

Figure 1. Centralized estimation with a fusion centre.
Different from its centralized counterpart, the distributed filtering scheme enables us to acquire the state estimates without the adoption of the fusion centre. Specifically, in the distributed setting, each node of an SN generates the local estimate of the system state by exploiting measurements from both itself and neighboring nodes according to the network topology. The structure diagram of the distributed state estimation is shown in Figure 2. As compared with the centralized filtering scheme, the distributed counterpart possesses the advantages of more flexibility, lower cost, and higher reliability. Despite these inherent advantages, the distributed filtering would pose essential challenges to the analysis of the filtering performance and the design of the filters. Particularly, one of the main challenges is how to take into account the complicated couplings between sensor nodes when constructing the distributed filter structure. In addition, the incompletely connected communication topology results in a sparse SN, and this renders additional difficulties in designing the distributed filter.

Figure 2. Distributed state estimation without a fusion centre.
Until now, the problem of distributed filtering (DF) has drawn considerable research interests and a wealth of literature has been published see e.g. [5-8]. Many effective DF approaches have been proposed for various systems under specific performance requirements, which mainly include the distributed finite-horizon  filtering method [9,10,76], the distributed set-membership filtering (SMF) strategy [11-13,32], the distributed variance-constrained filtering scheme [14-17], and the distributed particle filtering (PF) algorithm [18-20].
filtering method [9,10,76], the distributed set-membership filtering (SMF) strategy [11-13,32], the distributed variance-constrained filtering scheme [14-17], and the distributed particle filtering (PF) algorithm [18-20].
With the rapid development of network technologies, networked control systems have been gaining an ever-increasing popularity in practical applications due primarily to their distinct advantages of simple installation, easy maintenance, and low cost. While enjoying these merits, networked control systems, whose components are usually connected via shared yet constrained communication networks, are likely to experience undesired networked-induced phenomena including, but are not limited to, the packet dropout [9,21], signal quantization [7], transmission delay [22,23], sensor saturation [24], and channel fading [25,26]. These phenomena may seriously deteriorate the estimation performance if not handled properly, especially for networked control systems over SNs. For this reason, much research effort has been made to investigate the DF problems with various networked-induced phenomena [6,8,27-31].
On another research frontier, communication protocols (pledging that the signal transmissions are implemented according to certain prescribed "agreements") have played a vitally important role in networked control systems. Note that communication protocols are adopted resulting mainly from the network-based communication of limited capacity. More specifically, simultaneous transmissions of massive data across a shared communication network would inevitably result in data collisions. To fully use communication resources and relieve data collisions, an effective way is to exploit communication protocols such that only partial signals are permitted to transmit via the shared network.
So far, there are four kinds of communication protocols extensively investigated in the literature, which are the try-once-discard (TOD) protocol, the stochastic communication (SC) protocol, the round-robin (RR) protocol, and the event-triggered (ET) mechanism. For systems over SNs under scheduling protocols, the protocol-based DF issues have stirred considerable research interests, and many elegant and remarkable outcomes have been reported, see [16,26,33-35] for RR protocols, [36,37] for TOD protocols, [5,38,39] for SC protocols, and [12,13,40,41] for ET mechanisms.
In summary, it is an interesting, essential yet challenging topic to study the distributed filter design issues over SNs subject to communication constraints. This paper focuses on providing a timely review of recent advances on the DF problems with communication constraints. The organization of this paper is given in Figure 3. To be more specific, Section 2 presents the background of DF over SNs where some popular distributed filters are reviewed, followed by some basic knowledge of typical communication constraints. Section 3 reviews the recent progress on the DF issues for time-invariant systems. Section 4 further gives some latest results on the recursive DF schemes. In Section 5, two applications of DF are provided. Finally, the conclusion is drawn and some possible future research directions are presented in Section 6.

Figure 3. Organization of the survey.
2. Background on Distributed Filtering over SNs and Typical Communication Constraints
This section is concerned with the introduction about the background on DF and typical communication constraints. We shall review sequentially the architecture of SNs, the mathematical descriptions of some widely investigated DF approaches, and some typical communication constraints.
2.1. Background on Distributed Filtering for SNs
In this subsection, we focus our attention on the basic knowledge of DF issues over SNs. To begin with, let us consider a linear discrete-time system as follows:

where  is the sampling instant;
is the sampling instant;  is the vector of system state;
is the vector of system state;  is the process noise; and
is the process noise; and  and
and  are known time-varying matrices. Assume that system (1) is monitored by an SN with
are known time-varying matrices. Assume that system (1) is monitored by an SN with  spatially distributed sensor nodes. The communication among sensor nodes is conducted based on a fixed communication topology represented by a directed graph
spatially distributed sensor nodes. The communication among sensor nodes is conducted based on a fixed communication topology represented by a directed graph  . Here,
. Here,  is the set of sensors nodes.
is the set of sensors nodes.  is the set of edges. A directed edge
is the set of edges. A directed edge  means that node
means that node  can receive information from its neighboring node
can receive information from its neighboring node  .
.  denotes the weighted adjacency matrix with
denotes the weighted adjacency matrix with  if
if  , otherwise
, otherwise  . Furthermore, the neighboring set of node
. Furthermore, the neighboring set of node  is represented by
is represented by  .
.
The measurement output of the  -th sensor node is modeled by
-th sensor node is modeled by

where  denotes the measurement noise;
denotes the measurement noise;  represents the measurement output generated by the
represents the measurement output generated by the  -th sensor node; and
-th sensor node; and  and
and  are known time-varying matrices.
are known time-varying matrices.
Next, we shall establish the distributed filter structure for system (1). Throughout this paper,  and
and  are, respectively, defined as the actually derived state estimate and the received measurement of sensor
are, respectively, defined as the actually derived state estimate and the received measurement of sensor  ,
,  ,
,  ,
,  , and
, and  are the filter gains to be designed. Based on the literature review, the existing distributed filters can be classified into three arguably representative types listed as follow:
are the filter gains to be designed. Based on the literature review, the existing distributed filters can be classified into three arguably representative types listed as follow:
Adjacent-measurements-based distributed filter. This type of distributed filter has the following form [11,12,41]:

where  represents the aggregated measurements from all neighbors
represents the aggregated measurements from all neighbors  of sensor
of sensor  .
.
Adjacent-estimates-based distributed filter. The distributed filter based on adjacent state estimates is described by

as shown in [42] or

as presented in the literature [30,43-45], where  represents the state-estimate-associated innovation term from all neighbors of sensor
represents the state-estimate-associated innovation term from all neighbors of sensor  .
.
Adjacent-measurements & estimates-based distributed filter. The distributed filter based on both state estimates and adjacent measurements is given as Table 1.
Table 1. The distributed filters based on both adjacent measurements and estimates.

Compared with the centralized estimation algorithm, the distributed estimation algorithm takes the communication topology of SNs into account. Thus, in the DF framework, the desired state estimate of each sensor node is generated based on the information of both the individual node and the related neighboring nodes.
2.2. Background on Typical Communication Constraints
In almost all practical applications, the underlying plants are always described by dynamical systems with certain complexities such as nonlinearities, saturation and sensor faults. Such complexities are always known as traditional engineering complexities, which would pose significant challenges to the corresponding filtering problems. For example, as a ubiquitous feature existing in real-world scenarios, the nonlinearity would contribute significantly to the complexity of system modeling. Since nonlinearities may cause undesirable dynamic behaviors such as oscillation or even instability, the analysis and synthesis problems for nonlinear systems have long been the main stream of research topics. The state saturation is another frequently encountered phenomenon in engineering practices due mainly to inherent physical limitations of components. Moreover, the state saturation is inherently nonlinear, thus would render the traditional linear-system-based optimal filtering algorithms inapplicable. As such, dedicated efforts have been made to account for the saturation phenomenon with the aim to preserve the corresponding filtering performance. Sensor faults denote the abnormal situations on the sensors, which would normally bring in unexpected variations in the system measurements. Note that the filtering process should be implemented based on the received measurement data. Hence, the DF scheme should be designed with the full consideration of fault signals, which gives rise to certain challenges to the design of filter structures and parameters.
As described in Section 1, the utilization of communication networks would lead to network-induced phenomena (also known as network-induced complexities). These complexities would seriously affect the measurement signals received by the filters, thereby posing extra challenges to the design of the distributed filters. To effectively mitigate undesired phenomena and use limited network resources, communication protocols are often employed to the network-based communication scenarios to allocate the network access. The appearance of network-induced phenomena and the utilization of communication protocols undoubtedly play important roles in regulating transmission behaviors of the network signals and degrade the filtering performance. The aforementioned factors can be regarded as communication constraints (induced by non-ideal networks) which deserve deep investigation in designing the distributed filters. In what follows, communication constraints are generally divided into three types with related modelling methods.
2.2.1. Type I Transmission-Associated Constraints
The time delays, packet dropouts and packet disorder are three commonly encountered phenomena in engineering practice which are, respectively, introduced in the following paragraphs.
Transmission delays. In most networked control systems, time delays are inevitably encountered during the signal transmissions owing mainly to the remote transmission distance and the limited network bandwidth, see e.g. [57-62]. In the framework of SNs, measurements subject to time delays with respect to sensor  are denoted as
are denoted as  , where
, where  stands for the delay length that could be time-invariant or time-varying. Note that transmission delays are most likely to occur randomly which, if not properly handled, might result in performance degradation or even instability of the overall system. In recent years, some initial results concerning transmission delays over SNs have been available, see [22,41,63-65]. For example, a weighting average
stands for the delay length that could be time-invariant or time-varying. Note that transmission delays are most likely to occur randomly which, if not properly handled, might result in performance degradation or even instability of the overall system. In recent years, some initial results concerning transmission delays over SNs have been available, see [22,41,63-65]. For example, a weighting average  method has been used in [41] to design a proper distributed ET filter over wireless SNs with time-varying delays.
method has been used in [41] to design a proper distributed ET filter over wireless SNs with time-varying delays.
Packet disorder. The so-called packet disorder is another challenging issue which frequently occurs in the communication process. Such kind of phenomenon means that packets violate the first-in-first-out principle during the sensor-to-filter transmissions. To put it differently, although a certain packet is sent earlier, it might be delivered to the destination later. Such an issue would profoundly affect the resultant filtering performance. Till now, the filtering issue subject to packet disorder has stirred some initial investigative attention, and some preliminary outcomes have been reported, see e.g. [59,66-69]. For instance, the  filter design issue has been investigated in [69] for a class of discrete-time systems, where the impacts of packet disorder have been fully considered.
filter design issue has been investigated in [69] for a class of discrete-time systems, where the impacts of packet disorder have been fully considered.
Packet dropouts. During the data transmission over communication channels, the packet dropout phenomenon may occasionally occur due to probabilistic link failures and network congestions. In the existing literature, the most popular model to describe packet dropout is the Bernoulli distribution model presented as follows:

where  is a binary random variable taking values in the set
is a binary random variable taking values in the set  . A zero-order holder is usually adopted to compensate the effect from packet dropouts. In this case, the available measurement is characterized by
. A zero-order holder is usually adopted to compensate the effect from packet dropouts. In this case, the available measurement is characterized by

The problem of filtering has been extensively studied for dynamical systems over SNs subject to missing measurements, see e.g. [8,10,29,43,70]. Specifically, the problem of DF has been investigated in [70] for switched positive systems over SNs with randomly varying nonlinearities and packet dropouts, where sufficient conditions have been presented to guarantee the existence of the required filter.
2.2.2. Type II Quantization-Associated Effects
To improve the data security and alleviate the communication burden, quantization effects and encoding-decoding mechanisms are used to facilitate the data transmissions, which can be represented by the following unified model:

where  is the measurement received by the neighboring filter
is the measurement received by the neighboring filter  ; and
; and  is the corresponding quantization/coding-decoding error.
is the corresponding quantization/coding-decoding error.
Quantization. In the networked environment, the output signal is commonly quantized before being transmitted over the communication network due to the limitation of communication capacity and network bandwidth. The unavoidable deviation between the quantized signal and the raw signal is known as the quantization error which may further lead to performance deterioration. Therefore, it is essential to take into account the side-effects of the quantization process onto the filtering analysis and synthesis issues. Roughly speaking, the quantization process can be described as follows:

where  denotes the quantization function with the predetermined quantization level. Until now, much enthusiasm has been devoted to the quantization problems, and many results have been published in the literature, see e.g. [8,10,71-73].
denotes the quantization function with the predetermined quantization level. Until now, much enthusiasm has been devoted to the quantization problems, and many results have been published in the literature, see e.g. [8,10,71-73].
Encoding-Decoding. To achieve the security of the data transmission and improve the communication efficiency, it is essential to construct a pair of suitable encoder and decoder, which can significantly suppress the effect of the resultant data disturbance on the system performance. To date, the filtering/control problem under encoding-decoding schemes has attracted growing research interests, see e.g. [74,75,77-81] and the references therein. The general form of an encoding mechanism is modelled by

and the corresponding decoding mechanism is characterized by

where  is the decoded value of
is the decoded value of  at instant
at instant  ;
; 
 is the codeword generated at the encoding instant
is the codeword generated at the encoding instant  ;
;  is a constant representing the encoding period;
is a constant representing the encoding period;  denotes the encoder function; and
denotes the encoder function; and  denotes the decoder function. Recently, some initial research interests have been devoted to the DF problem subject to the encoding-decoding effects [28,51,78,82-84].
denotes the decoder function. Recently, some initial research interests have been devoted to the DF problem subject to the encoding-decoding effects [28,51,78,82-84].
2.2.3. Type III Scheduling-Associated Mechanisms
Communication scheduling strategies can significantly alleviate network congestions and extend the lifetime of sensors, and thus have become one of the most powerful strategies to reduce resource consumptions [85]. The scheduling methods can be performed in a periodic, acyclic or random manner such that transmissions are activated only when some specific events occur. It is not surprising that the DF problem over SNs under the effects of communication scheduling has received more and more attention from researchers. The representative communication scheduling strategies under consideration include the SC protocol, the WTOD protocol, the RR protocol, as well as the ET mechanism, all of which can be described by the following unified model:

where  is the received measurement from the neighbor of sensor node
is the received measurement from the neighbor of sensor node  ; and
; and  denote the predetermined scheduling functions based on certain practical requirements. In the following, we are going to separately introduce the mechanisms of the mentioned four protocols.
denote the predetermined scheduling functions based on certain practical requirements. In the following, we are going to separately introduce the mechanisms of the mentioned four protocols.
RR protocol. The RR protocol is a static scheduling mechanism which commonly used in token ring networks. The transmission rule  has the following form:
has the following form:

The network nodes are assigned the access opportunities to the communication networks according to a fixed circular order. The communication network can only be accessed by one network node that is in possession of the token. To date, numerous research results have been reported on the impact of the RR protocol over SNs [16,26,34,36].
WTOD protocol. The WTOD protocol is a dynamic scheduling mechanism that assigns the access opportunities to the communication network based on the difference between the current data and the last transmitted data of the concerned node. To be more specific, the network access is assigned to the node with the largest weighted deviation from the last reported value, and the transmission rule is given as follows:

where  is the measurement at the latest time
is the measurement at the latest time  ; and
; and  represents the weighted parameter. The WTOD protocol has been first presented in literature [86], where the scheduling principle of this protocol has been discussed. Since then, the WTOD protocol has been extensively researched [72].
represents the weighted parameter. The WTOD protocol has been first presented in literature [86], where the scheduling principle of this protocol has been discussed. Since then, the WTOD protocol has been extensively researched [72].
SC protocol. Another protocol is the SC protocol, which is also referred to as the random access protocol. The transmission rule is presented by  with
with  This protocol is featured by the fact that all nodes are allowed to get the network access with certain probabilities. When the network is idle, the node with the highest priority obtains the network access. For each node that intends to transmit data, an acknowledgment from the communication channel would be obtained to verify if the channel is available or not. The communication channel is unavailable if the channel is accessed by other network nodes. In this case, the node trying to transmit data will notice the conflict and wait for the next opportunity to access the network in accordance with a certain conflict rule [5,30,87,88].
This protocol is featured by the fact that all nodes are allowed to get the network access with certain probabilities. When the network is idle, the node with the highest priority obtains the network access. For each node that intends to transmit data, an acknowledgment from the communication channel would be obtained to verify if the channel is available or not. The communication channel is unavailable if the channel is accessed by other network nodes. In this case, the node trying to transmit data will notice the conflict and wait for the next opportunity to access the network in accordance with a certain conflict rule [5,30,87,88].
ET schemes. To lighten the communication burden, the ET-based filtering strategies have been particularly studied for networked control systems [89-94]. Typically, a quadratic cost function dependent on the time, system state or sampled data is used to describe the ET condition. Note that this cost function shows the difference in absolute or relative inaccuracy between the most recently transmitted information and the actual state/measurement information. The mathematical model of the ET condition is described by

Here, the event generator  determines whether or not the current measurement
determines whether or not the current measurement  needs to be sent in comparison with the last transmitted measurement
needs to be sent in comparison with the last transmitted measurement  at the transmission instant
at the transmission instant  ; and
; and  is generally defined as
is generally defined as  , which represents a gap.
, which represents a gap.
This section focuses on several efficient DF algorithms for various time-invariant systems over SNs with constrained communications.
3. Time-Invariant Distributed Filtering Subject to Communication Constraints
This section focuses on several efficient DF algorithms for various time-invariant systems over SNs with constrained communications.
3.1. H∞ Filtering
For systems undergoing energy-bounded noises, the  filtering technique has proven to be a powerful tool in providing an
filtering technique has proven to be a powerful tool in providing an  -gain disturbance rejection constraint that characterizes the sensitivity performance. For a system subject to additive type energy-bounded noises
-gain disturbance rejection constraint that characterizes the sensitivity performance. For a system subject to additive type energy-bounded noises  and
and  , the corresponding
, the corresponding  performance constraint is defined as
performance constraint is defined as  under zero initial conditions, where
under zero initial conditions, where

Here,  is a disturbance attenuation level, and
is a disturbance attenuation level, and  is the estimation error. The response quality of the estimation error dynamics can be evaluated by ensuring
is the estimation error. The response quality of the estimation error dynamics can be evaluated by ensuring  with a small disturbance attenuation level
with a small disturbance attenuation level  . A possible definition of optimality in this sense is to minimize the performance level
. A possible definition of optimality in this sense is to minimize the performance level  under the constraint
under the constraint  .
.
The past few decades have witnessed increasing research interests to the investigation of the distributed  filter design issues subject to different communication constraints [35,65,95]. For instance, the distributed
filter design issues subject to different communication constraints [35,65,95]. For instance, the distributed  filtering algorithms have been established for systems suffering from saturation constraints [95,96], where the sensor/actuator saturations are converted into certain bounded nonlinear conditions. In addition, some effective DF schemes have been proposed in the literature for handling networked systems with various scheduling-associated mechanisms. Particularly, the distributed filters have been elaborately designed in [34,96] by utilizing the time-delay approach and in [97] by resorting to the periodic system analysis method. Moreover, the finite-time distributed
filtering algorithms have been established for systems suffering from saturation constraints [95,96], where the sensor/actuator saturations are converted into certain bounded nonlinear conditions. In addition, some effective DF schemes have been proposed in the literature for handling networked systems with various scheduling-associated mechanisms. Particularly, the distributed filters have been elaborately designed in [34,96] by utilizing the time-delay approach and in [97] by resorting to the periodic system analysis method. Moreover, the finite-time distributed  state estimation problem has been investigated in [26] for a class of nonlinear systems subject to the RR protocol over fading channels.
state estimation problem has been investigated in [26] for a class of nonlinear systems subject to the RR protocol over fading channels.
Note that the time-delay phenomenon occurred in communication will affect the dynamics of filtering errors, and thus the analysis of performance can be carried out by putting some time-related terms in the Lyapunov functionals to reveal the effect of time delays. We refer readers to [65,98,99] for some graceful and elegant outcomes on various time-delayed systems. As an example, in [98], a full-order channel-dependent estimator has been developed to provide reliable state estimates under transmission delays and channel switching. In [99], a delay-fractioning method has been utilized to deal with the ET distributed state estimation problem for stochastic nonlinear systems. Based on multiple Lyapunov functional methods, a distributed  filter has been constructed in [65] by resorting to the convex optimization.
filter has been constructed in [65] by resorting to the convex optimization.
When it comes to nonlinear systems, the distributed  filtering problem has been considered in [100] for a series of Takagi-Sugeno fuzzy models over SNs with quantization effects and switching topologies. In this work, the desired distributed filter gain and the permitted noise rejection level have been obtained with the help of the average dwell time approach. Furthermore, a similar result has been reported for discrete-time Markov-hop Lur'e systems in [27] with the use of a Lur'e type Lyapunov function, where the transmission model has the ability to describe the randomly occurring packet dropout and signal quantization under redundant channels.
filtering problem has been considered in [100] for a series of Takagi-Sugeno fuzzy models over SNs with quantization effects and switching topologies. In this work, the desired distributed filter gain and the permitted noise rejection level have been obtained with the help of the average dwell time approach. Furthermore, a similar result has been reported for discrete-time Markov-hop Lur'e systems in [27] with the use of a Lur'e type Lyapunov function, where the transmission model has the ability to describe the randomly occurring packet dropout and signal quantization under redundant channels.
3.2. H2/H∞ Filtering
As an important performance index of the target plant, the  specification has been extensively utilized in control/filtering communities. From the viewpoint of optimal control and filtering, the desired
specification has been extensively utilized in control/filtering communities. From the viewpoint of optimal control and filtering, the desired  controllers or filters can be designed by optimizing certain linear quadratic functions (namely, the cost functions) according to the inherent features of underlying disturbances [75]. For the system with the stochastic noise, the corresponding
controllers or filters can be designed by optimizing certain linear quadratic functions (namely, the cost functions) according to the inherent features of underlying disturbances [75]. For the system with the stochastic noise, the corresponding  performance is defined as
performance is defined as

and the purpose of the  filtering is to design the filter such that the
filtering is to design the filter such that the  (or the upper-bound for
(or the upper-bound for  ) is minimized. The combination of
) is minimized. The combination of  and
and  performance specifications gives rise to the so-called
performance specifications gives rise to the so-called  scheme that has significant advantages in depicting the performance accuracy with mixed disturbances and sustaining the optimality and robustness against disturbances simultaneously [101]. As such, the mixed
scheme that has significant advantages in depicting the performance accuracy with mixed disturbances and sustaining the optimality and robustness against disturbances simultaneously [101]. As such, the mixed  scheme would provide a better performance than a separate
scheme would provide a better performance than a separate  or
or  scheme. Inspired by the initial work in [102], the
scheme. Inspired by the initial work in [102], the  strategy has been extensively investigated to address multi-objective optimization problems with a variety of applications that can be found in [101,103].
strategy has been extensively investigated to address multi-objective optimization problems with a variety of applications that can be found in [101,103].
Thanks to its superiority in evaluating the resultant accuracy, the  method has been employed to cope with the control and filtering issues over SNs during the past decade [104,105]. In [104], a mixed
method has been employed to cope with the control and filtering issues over SNs during the past decade [104,105]. In [104], a mixed  control method has been proposed for an uncertain system over SNs with random time delays, packet dropouts, and sensor faults so as to solve the multiple-objective control problem. The
control method has been proposed for an uncertain system over SNs with random time delays, packet dropouts, and sensor faults so as to solve the multiple-objective control problem. The  estimation performance over SNs has been analyzed in [105], where ET scheme-based signal selection method has been developed to deal with network-induced packet disorders and packet dropouts. The distributed mixed
estimation performance over SNs has been analyzed in [105], where ET scheme-based signal selection method has been developed to deal with network-induced packet disorders and packet dropouts. The distributed mixed  fusion estimation problem has been investigated in [106] for a class of networked multi-sensor fusion systems with limited communication capacity. A novel strategy has been proposed to reduce the transmission traffic, and an optimal fusion criterion on the distributed mixed
fusion estimation problem has been investigated in [106] for a class of networked multi-sensor fusion systems with limited communication capacity. A novel strategy has been proposed to reduce the transmission traffic, and an optimal fusion criterion on the distributed mixed  fusion estimation has been established in terms of linear matrix inequalities (LMIs). Moreover, the distributed
fusion estimation has been established in terms of linear matrix inequalities (LMIs). Moreover, the distributed  filtering scheme has been adopted in [107] for the considered continuous-time systems in the presence of bounded power uncertainties and stochastic white noises.
filtering scheme has been adopted in [107] for the considered continuous-time systems in the presence of bounded power uncertainties and stochastic white noises.
3.3. l2–l∞ Filtering
The  –
–  filtering (also known as energy-to-peak filtering) is an effective technique to guarantee the peak filtering error subject to the energy-bounded noises [108-110]. Under the zero-initial condition, the
filtering (also known as energy-to-peak filtering) is an effective technique to guarantee the peak filtering error subject to the energy-bounded noises [108-110]. Under the zero-initial condition, the  –
–  performance constraint is defined as
performance constraint is defined as  , where
, where

Here,  is the filtering error,
is the filtering error,  is the energy-to-peak performance index, and
is the energy-to-peak performance index, and  is the peak value of the estimation error. Different from the
is the peak value of the estimation error. Different from the  filtering whose aim is to suppress the energy of the resultant filtering error subject to the energy-bounded noises, the
filtering whose aim is to suppress the energy of the resultant filtering error subject to the energy-bounded noises, the  –
–  filtering intends to ensure a relatively small amplitude of the filtering error (in the sense of peak value of the filtering error) subject to the energy-bounded noises. Note that the
filtering intends to ensure a relatively small amplitude of the filtering error (in the sense of peak value of the filtering error) subject to the energy-bounded noises. Note that the  –
–  filtering approach is recognized as a generalized form of the
filtering approach is recognized as a generalized form of the  filtering method or a deterministic form of the Kalman filtering (KF) structure [111].
filtering method or a deterministic form of the Kalman filtering (KF) structure [111].
To date, the distributed  –
–  filtering issue has attained particular concerns from many researchers and a large body of literature has appeared on this topic, see e.g. [112,113] and the references therein. In [112], the distributed non-fragile
filtering issue has attained particular concerns from many researchers and a large body of literature has appeared on this topic, see e.g. [112,113] and the references therein. In [112], the distributed non-fragile  –
–  filtering issue has been investigated for a class of discrete-time nonlinear systems with fading measurements and random gain variations. The
filtering issue has been investigated for a class of discrete-time nonlinear systems with fading measurements and random gain variations. The  –
–  state estimation issue has been studied in [113] for nonlinear coupled networks over redundant channels under RR protocols, where both the
state estimation issue has been studied in [113] for nonlinear coupled networks over redundant channels under RR protocols, where both the  –
–  performance level and the exponential stability of the estimation error dynamics have been ensured.
performance level and the exponential stability of the estimation error dynamics have been ensured.
4. Recursive Distributed Filtering Subject to Communication Constraints
This section presents some effective approaches to addressing the recursive DF problems over SNs subject to communication constraints.
4.1. Recursive Distributed Variance-Constrained Filtering Subject to Communication Constraints
The classical KF is particularly useful for estimating the states of linear Gaussian systems, where the system parameters and the statistical information of noises are exactly known. Roughly speaking, the Kalman filter of a recursive form (known as an optimal filter) can provide the minimum mean-square error (MSE) estimation for the considered linear systems. The renowned Kalman filter has been first developed in the seminal work [114]. Ever since then, the KF algorithm has been gaining recurring research interests in both signal processing and automatic control communities due primarily to its widespread applications in tracking systems, automated surveillance systems and power systems [115-117].
To improve the robustness of the traditional KF algorithm, the variance-constrained filtering strategy has been proposed for systems with parameter uncertainties and modelling errors [118,119]. Noting that the idea of the variance-constrained filtering is to construct an appropriate filter with which the minimum upper bound can be ensured on the estimation error variance. Great progress has been made over the past few years on the variance-constrained filtering problems over SNs with communication constraints [7,22,31,70,120]. For instance, in [7], the recursive DF issue has been studied for a series of discrete time-delayed stochastic systems with both deception attacks and uniform quantization effects. In [15], the resilient DF problem has been concerned for a class of time-varying multirate systems over SNs subject to time-correlated fading channels.
Till now, the variance-constrained filtering problems subject to communication protocols have drawn a surge of research interests with fruitful results [5,14,16,38,120-122]. In particular, the recursive DF problem has been studied in [122] under a dynamic ET mechanism, where the measurement output is monitored by an SN whose topology is connected through Gilbert-Elliott channels managed by a set of Markov chains. In [16], the recursive DF problem has been investigated for stochastic discrete time-varying systems subject to both RR protocols and state saturations over SNs. In [17], the variance-constrained DF issue has been addressed for time-varying systems under deception attacks and WTOD protocol. In [121], the ET Kalman consensus filtering has been exploited to solve a two-target tracking issue over SNs.
4.2. Recursive Distributed Finite Horizon \( H_{\infty} \) Filtering Subject to Communication Constraints
Unlike the classical KF algorithm that can derive the minimum MSE estimation, the  filtering is capable of ensuring satisfactory estimation accuracy of the underlying systems with energy-bounded noises, thereby enhancing the robustness of the filter. As such, the
filtering is capable of ensuring satisfactory estimation accuracy of the underlying systems with energy-bounded noises, thereby enhancing the robustness of the filter. As such, the  filtering scheme has become a nice choice when dealing with the estimation problem for systems experiencing energy-bounded disturbances.
filtering scheme has become a nice choice when dealing with the estimation problem for systems experiencing energy-bounded disturbances.
Note that the distributed filters mentioned in Subsection 3.1 are designed over certain infinite time interval. Nevertheless, in many practical situations, a finite-horizon filter can provide a better transient performance for the filtering error dynamics especially when the noise inputs are non-stationary. Therefore, it is of great importance to deal with the DF problems over a finite horizon. Recently, a wealth of literature has been published on the topic of the finite-horizon  filtering issues over SNs [9,10,40,64,73,123].
filtering issues over SNs [9,10,40,64,73,123].
In response to the popularity of SNs with comminution constraints, the distributed finite-horizon  state estimators have been designed for systems subject to various network-induced complexities, such as multiple missing measurements [9,10,76], quantization errors [10,73], transmission delays [64], and communication protocols [64,76]. In these results, based on the
state estimators have been designed for systems subject to various network-induced complexities, such as multiple missing measurements [9,10,76], quantization errors [10,73], transmission delays [64], and communication protocols [64,76]. In these results, based on the  scheme, the relation between the external inputs (including the disturbances and initial states) and the resultant estimation performance has been elaborately discussed in the framework of DF over a finite horizon.
scheme, the relation between the external inputs (including the disturbances and initial states) and the resultant estimation performance has been elaborately discussed in the framework of DF over a finite horizon.
In [9], the distributed  consensus filter has been designed under multiple packet dropouts by using the LMI technique. Based on the solutions to a series of recursive LMIs, a distributed filter for a series of stochastic systems has been designed in [76] such that both the
consensus filter has been designed under multiple packet dropouts by using the LMI technique. Based on the solutions to a series of recursive LMIs, a distributed filter for a series of stochastic systems has been designed in [76] such that both the  requirement and the variance constraint are satisfied over a given finite-horizon against successive packet drops, stochastic noises as well as random parameter matrices. The DF issue has been analyzed in [10] for a series of time-varying systems with successive packet dropouts and quantization errors. The distributed finite-horizon
requirement and the variance constraint are satisfied over a given finite-horizon against successive packet drops, stochastic noises as well as random parameter matrices. The DF issue has been analyzed in [10] for a series of time-varying systems with successive packet dropouts and quantization errors. The distributed finite-horizon  filtering problems subject to communication protocols have been further studied in [64,76,124-128].
filtering problems subject to communication protocols have been further studied in [64,76,124-128].
4.3. Recursive Distributed Set-Membership Filtering Subject to Communication Constraints
When SNs are susceptible to deterministic norm-bounded noises, the distributed KF or  filtering might be impractical to ensure satisfactory performance and, accordingly, the distributed SMF is recognized as a favorite candidate. Different from the conventional point-wise filtering strategy that generates a point estimate of the system state, the SMF method is capable of providing a set of compact regions which contain all possible real states. The distributed SMF has recently aroused considerable research attention due to its distinct merit in tackling systems with unknown-but-bounded noises.
filtering might be impractical to ensure satisfactory performance and, accordingly, the distributed SMF is recognized as a favorite candidate. Different from the conventional point-wise filtering strategy that generates a point estimate of the system state, the SMF method is capable of providing a set of compact regions which contain all possible real states. The distributed SMF has recently aroused considerable research attention due to its distinct merit in tackling systems with unknown-but-bounded noises.
There is no doubt that the existence of communication protocols and network-induced phenomena will significantly complicate the corresponding SMF problem. So far, a large number of results have been available on the distributed set-membership state estimation subject to network-induced phenomena [11,12,28,78,129,130]. For instance, the distributed SMF scheme has been developed for systems with sensor saturations [11], where the distributed filter has been designed to ensure the desired average filtering performance over lossy SNs. In addition, the set-membership filter design issue has been studied in [78] for an array of time-varying systems over SNs with an encoding-decoding mechanism. On the other hand, the SMF problems have also been extensively studied over SNs under communication protocols [12,13,32,36,129-131]. More specifically, based on the interval mathematical theory, a recursive distributed set-membership filter has been designed in [ 13] for a class of general discrete-time nonlinear systems under ET protocols. In [32], the distributed SMF issue has been studied for a series of time-varying multi-rate systems over SNs under RR protocols. With the aid of an effective recursive LMI method, the distribution SMF issue has been reported in [130] for nonlinear systems subject to the ET mechanism and saturation effects.
4.4. Recursive Distributed Particle Filtering
The PF algorithm has become an extremely powerful method to solve the filtering issues for general nonlinear systems with non-Gaussian noises. Notice that the basic idea of the PF scheme is to find a set of random samples propagating in the state space to approximate the probability density function of the state of interests and further obtain the state minimum estimation error variance. On account of their wide applicability, the distributed PF issues over SNs have attracted growing attention from both academy and industry, and many important results have been reported in the literature, see e.g. [19,20,132-135].
Based on a diffusion-based scheme, the distributed PF problem has been investigated in [133] for nonlinear non-Gaussian systems over SNs under the dynamic ET protocol. Here, both the local posteriors and the local measurements are exchanged among sensor nodes according to the given network topology. To avoid the network overload, a distributed PF algorithm has been proposed in [20] for target tracking systems over SNs. In this work, an average consensus filter or forward-backward propagation strategy has been proposed in hope of saving energy and reliving bandwidth burden during the information exchange. In [19], a global likelihood function has been estimated for each node according to a consensus algorithm, and then the particle weights have been updated by using the derived likelihood function. For location estimation problems over SNs, a novel particle filter has been designed in [136] by incorporating a semi-supervised machine learning method which is dedicated to processing limited labelled training data. The designed particle filter is efficient in handling dynamically changing characteristics of the considered system.
5. Application of Distributed Filtering
In this section, the proposed DF schemes over SNs are applied to target tracking systems and distributed grid-connected power generation systems to show their effectiveness and feasibility.
5.1. Target Tracking Systems
A key issue in target tracking systems over SNs is to extract useful information (such as position information and velocity information) by estimating the state of interests based on available measurements collected by the spatially distributed sensors. As is well known, each sensor collects the local measurements as well as the estimates and/or measurements from the neighboring sensors to generate an updated state estimate. To facilitate the information extraction, there is a practical need to construct a suitable mathematical model to describe the target motion over constrained networks, and this requires the establishment of efficient tracking algorithms for estimating true target states. Nowadays, substantial attention has been paid to DF issues and their applications to target tracking systems. A wireless-SN-based target tracking system is consisted of a mobile target and a number of wireless sensors. As presented in Figure 4, sensors can only broadcast their local estimates to neighboring sensors due to limited power, memory, and computational capacities. Moreover, each sensor can both observe the moving target and gather local estimates from neighbors to form an updated estimate so as to improve estimation accuracy of the target. For example, the localization problem of distributed wheeled mobile robots over SNs has been studied in [25] by using the distributed ET-based filtering technique, where an algorithm with adaptive triggering thresholds has been proposed to obtain the desired average transmission rate during tracking and estimation. In [121], the Kalman consensus filtering algorithm has been applied to dual-target tracking problems over SNs, and the desired distributed filters have been devised to track the interested targets. In addition, a distributed SMF algorithm has been provided in [137] for dynamic target tracking systems based on a partial information transmission scheme, where better estimation and tracking performance have been obtained with more available measurements.
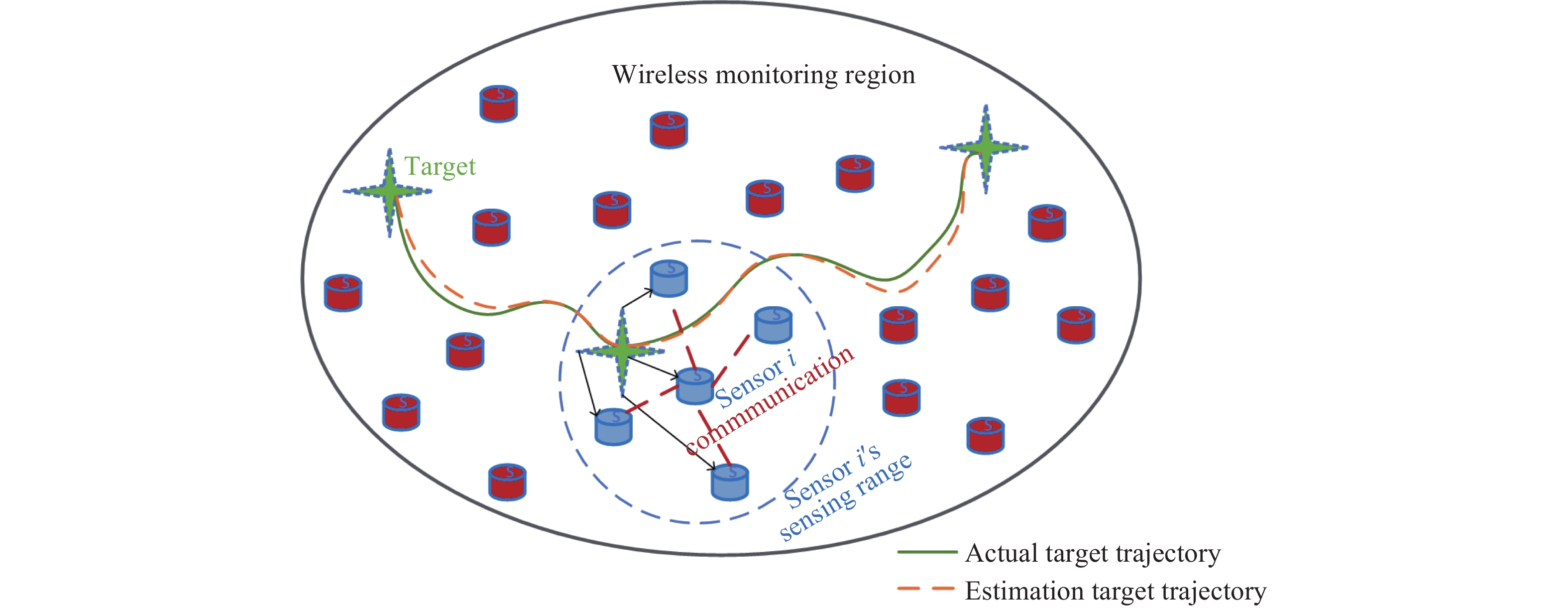
Figure 4. Mobile target tracking using a sensor network.
5.2. Distributed Generation Systems
In addition to target tracking systems, the distributed generation system is another important application of SNs. Note that unintentional islanding has become a significant safety issue in distributed grid-connected power systems (including distributed solar power and distributed wind systems). The unintentional islanding may create security hazards, which may further produce severe electrical damage to user equipment and even harm to service personnel, and thus it is essential to detect and analyze them promptly for preventing security risks. In [138], the distributed SMF strategy has been applied to the islanding detection issue of distributed grid-connected solar power systems, where a suitable distributed ET-based estimator has been designed. The structure diagram of the distributed grid-connected photovoltaic generation system is shown in Figure 5,where a circuit-breaker is used to establish the connection between the distributed grid and the solar photovoltaic generation system, i.e., the solar photovoltaic generation system is working in a grid-connected or islanding manner. Furthermore, the distributed state estimation issue has been addressed in [139] for large-scale power systems over networks subject to limited bandwidth constraints.

Figure 5. Grid-connected PV generation system configuration.
6. Conclusions and Future Works
In this survey, the recent results on DF issues have been reviewed for dynamical systems subject to communication scheduling protocols and/or network-induced phenomena. Firstly, the basic backgrounds of DF over SNs under communication constraints have been discussed by introducing mathematical models of different distributed filter structures, communication protocols, and network-induced phenomena. Subsequently, the DF algorithms have been surveyed for various networked systems over SNs undergoing communication constraints. Furthermore, two applications of the DF issues have been further discussed. Some related research topics for further investigation are listed as follows:
Security. In view of the inherent network opening-up, data transmissions via shared networks (especially for over SNs) are vulnerable to cyber threats such as denial-of-service attacks, undetectable stealth attacks, replay attacks, and false data injection attacks. The occurrence of cyber-attacks would lead to severe performance degradation or even system disruption, which might further result in huge economic losses and social risks. Therefore, it is of great importance to investigate the security issue over SNs.
Scalability and density. In many practical situations, numerous sensors are spatially deployed in a certain area with the aim to monitor the target plant. As the number of sensor nodes in SNs becomes large, the communication burden will be huge and, accordingly, the computation complexity of the DF algorithms will increase dramatically. This fact inevitably limits the application of DF schemes in large-scale SNs. Therefore, it is imperative to develop advanced DF algorithms to cater for the scalable requirements.
Energy-efficiency. Although there are some communication scheduling schemes capable of reducing energy consumptions, the energy-efficient issue over SNs has not been well investigated. Therefore, it would be a promising research direction to develop energy-efficient strategies over SNs capable of reducing energy consumptions while maintaining satisfactory estimation performance.
Author Contributions: Yu-Ang Wang: original draft writing; Bo Shen: writing–supervision, review and editing of writing, and funding acquisition; Lei Zou: writing–supervision, review and editing of writing, and funding acquisition; Qing-Long Han: writing–supervision, review and editing of writing, and funding acquisition. All authors have read and agreed to the published version of the manuscript.
Funding: This work was supported in part by the National Natural Science Foundation of China under Grants 62273088 and 62273087, the Program of Shanghai Academic/Technology Research Leader of China under Grant 20XD1420100, and the Shanghai Pujiang Program of China under Grant 22PJ1400400.
Conflicts of Interest: The authors declare no conflict of interest.

References
- Bianchi, P.; Jakubowicz, J.; Roueff, F. Linear precoders for the detection of a Gaussian process in wireless sensors networks. IEEE Trans. Signal Process., 2011, 59: 882−894. doi: 10.1109/TSP.2010.2092771
- Kokiopoulou, E.; Frossard, P. Distributed classification of multiple observation sets by consensus. IEEE Trans. Signal Process., 2011, 59: 104−114. doi: 10.1109/TSP.2010.2086450
- Ding, D.R.; Wang, Z.D.; Han, Q.L.; et al. Recursive secure filtering over Gilbert-Elliott channels in sensor networks: The distributed case. IEEE Trans. Signal Inf. Proc. Netw., 2021, 7: 75−86. doi: 10.1109/TSIPN.2020.3046220
- Zhu, M.Z.; Chen, Y.; Kong, Y.G.; et al. Distributed filtering for Markov jump systems with randomly occurring one-sided Lipschitz nonlinearities under round-robin scheduling. Neurocomputing, 2020, 417: 396−405. doi: 10.1016/j.neucom.2020.08.006
- Wang, F.; Wang, Z.D.; Liang, J.L.; et al. Recursive distributed filtering for two-dimensional shift-varying systems over sensor networks under stochastic communication protocols. Automatica, 2020, 115: 108865. doi: 10.1016/j.automatica.2020.108865
- Yang, H.J.; Li, H.; Xia, Y.Q.; et al. Distributed Kalman filtering over sensor networks with transmission delays. IEEE Trans. Cybern., 2021, 51: 5511−5521. doi: 10.1109/TCYB.2020.2980582
- Ding, D.R.; Wang, Z.D.; Ho, D.W.C.; et al. Distributed recursive filtering for stochastic systems under uniform quantizations and deception attacks through sensor networks. Automatica, 2017, 78: 231−240. doi: 10.1016/j.automatica.2016.12.026
- Zhang, D.; Xu, Z.H.; Karimi, H.R.; et al. Distributed filtering for switched linear systems with sensor networks in presence of packet dropouts and quantization. IEEE Trans. Circuits Syst. I Reg. Papers, 2017, 64: 2783−2796. doi: 10.1109/TCSI.2017.2695481
- Shen, B.; Wang, Z.D.; Huang, Y.S. Distributed H∞-consensus filtering in sensor networks with multiple missing measurements: The finite-horizon case. Automatica, 2010, 46: 1682−1688. doi: 10.1016/j.automatica.2010.06.025
- Dong, H.L.; Wang, Z.D.; Gao, H.J. Distributed filtering for a class of time-varying systems over sensor networks with quantization errors and successive packet dropouts. IEEE Trans. Signal Process., 2012, 60: 3164−3173. doi: 10.1109/TSP.2012.2190599
- Ma, L.F.; Wang, Z.D.; Lam, H.K.; et al. Distributed event-based set-membership filtering for a class of nonlinear systems with sensor saturations over sensor networks. IEEE Trans. Cybern., 2017, 47: 3772−3783. doi: 10.1109/TCYB.2016.2582081
- Ge, X.H.; Han, Q.L.; Wang, Z.D. A dynamic event-triggered transmission scheme for distributed set-membership estimation over wireless sensor networks. IEEE Trans. Cybern., 2019, 49: 171−183. doi: 10.1109/TCYB.2017.2769722
- Ding, D.R.; Wang, Z.D.; Han, Q.L. A set-membership approach to event-triggered filtering for general nonlinear systems over sensor networks. IEEE Trans. Autom. Control, 2020, 65: 1792−1799. doi: 10.1109/TAC.2019.2934389
- Liu, Q.Y.; Wang, Z.D.; He, X.; et al. Event-based recursive distributed filtering over wireless sensor networks. IEEE Trans. Autom. Control, 2015, 60: 2470−2475. doi: 10.1109/TAC.2015.2390554
- Li, Q.; Wang, Z.D.; Shen, B.; et al. A resilient approach to recursive distributed filtering for multirate systems over sensor networks with time-correlated fading channels. IEEE Trans. Signal Inf. Proc. Netw., 2021, 7: 636−647. doi: 10.1109/TSIPN.2021.3117366
- Shen, B.; Wang, Z.D.; Wang, D.; et al. Distributed state-saturated recursive filtering over sensor networks under round-robin protocol. IEEE Trans. Cybern., 2020, 50: 3605−3615. doi: 10.1109/TCYB.2019.2932460
- Ma, L.F.; Wang, Z.D.; Han, Q.L.; et al. Variance-constrained distributed filtering for time-varying systems with multiplicative noises and deception attacks over sensor networks. IEEE Sensors J., 2017, 17: 2279−2288. doi: 10.1109/JSEN.2017.2654325
- Vázquez, M.A.; Míguez, J. A robust scheme for distributed particle filtering in wireless sensors networks. Signal Process., 2017, 131: 190−201. doi: 10.1016/j.sigpro.2016.08.003
- Hlinka, O.; Slučiak, O.; Hlawatsch, F.; et al. Likelihood consensus and its application to distributed particle filtering. IEEE Trans. Signal Process., 2012, 60: 4334−4349. doi: 10.1109/TSP.2012.2196697
- Ghirmai, T. Distributed particle filter for target tracking: With reduced sensor communications. Sensors, 2016, 16: 1454. doi: 10.3390/s16091454
- Yan, H.C.; Qian, F.F.; Yang, F.W.; et al. H∞ filtering for nonlinear networked systems with randomly occurring distributed delays, missing measurements and sensor saturation. Inf. Sci. 2016, 370–371, 772–782. doi: 10.1016/j.ins.2015.09.027
- Jin, H.; Sun, S.L. Distributed filtering for sensor networks with fading measurements and compensations for transmission delays and losses. Signal Process., 2022, 190: 108306. doi: 10.1016/j.sigpro.2021.108306
- Feng, S.Y.; Yu, H.; Jia, C.Q.; et al. Joint state and fault estimation for nonlinear complex networks with mixed time-delays and uncertain inner coupling: Non-fragile recursive method. Syst. Sci. Control Eng., 2022, 10: 603−615. doi: 10.1080/21642583.2022.2086183
- Li, Z.H.; Hu, J.; Li, J.X. Distributed filtering for delayed nonlinear system with random sensor saturation: A dynamic event-triggered approach. Syst. Sci. Control Eng., 2021, 9: 440−454. doi: 10.1080/21642583.2021.1919935
- Liu, Q.Y.; Wang, Z.D.; He, X.; et al. Event-based distributed filtering with stochastic measurement fading. IEEE Trans. Ind. Inf., 2015, 11: 1643−1652. doi: 10.1109/TII.2015.2444355
- Xu, Y.; Lu, R.Q.; Shi, P.; et al. Finite-time distributed state estimation over sensor networks with round-robin protocol and fading channels. IEEE Trans. Cybern., 2018, 48: 336−345. doi: 10.1109/TCYB.2016.2635122
- Zhu, Y.Z.; Zhang, L.X.; Zheng, W.X. Distributed H∞ filtering for a class of discrete-time Markov jump Lur’e systems with redundant channels. IEEE Trans. Industr. Electron., 2016, 63: 1876−1885. doi: 10.1109/TIE.2015.2499169
- Zhu, K.Q.; Wang, Z.D.; Han, Q.L.; et al. Distributed set-membership fusion filtering for nonlinear 2-D systems over sensor networks: An encoding-decoding scheme. IEEE Trans. Cybern., 2023, 53: 416−427. doi: 10.1109/TCYB.2021.3110587
- Zhang, L.X.; Ning, Z.P.; Wang, Z.D. Distributed filtering for fuzzy time-delay systems with packet dropouts and redundant channels. IEEE Trans. Syst. Man Cybern. Syst., 2016, 46: 559−572. doi: 10.1109/TSMC.2015.2435700
- Yu, H.Y.; Zhuang, Y.; Wang, W. Distributed H∞ filtering in sensor networks with randomly occurred missing measurements and communication link failures. Inf. Sci., 2013, 222: 424−438. doi: 10.1016/j.ins.2012.07.059
- Wen, C.B.; Wang, Z.D.; Liu, Q.Y.; et al. Recursive distributed filtering for a class of state-saturated systems with fading measurements and quantization effects. IEEE Trans. Syst. Man Cybern. Syst., 2018, 48: 930−941. doi: 10.1109/TSMC.2016.2629464
- Liu, S.; Wang, Z.D.; Wei, G.L.; et al. Distributed set-membership filtering for multirate systems under the round-robin scheduling over sensor networks. IEEE Trans. Cybern., 2020, 50: 1910−1920. doi: 10.1109/TCYB.2018.2885653
- Hu, Z.B.; Hu, J.; Tan, H.L.; et al. Distributed resilient fusion filtering for nonlinear systems with random sensor delay under round-robin protocol. Int. J. Syst. Sci., 2022, 53: 2786−2799. doi: 10.1080/00207721.2022.2062802
- Liu, K.; Guo, H.; Zhang, Q.R.; et al. Distributed secure filtering for discrete-time systems under round-robin protocol and deception attacks. IEEE Trans. Cybern., 2020, 50: 3571−3580. doi: 10.1109/TCYB.2019.2897366
- Ugrinovskii, V.; Fridman, E. A round-robin type protocol for distributed estimation with H∞ consensus. Syst. Control Lett., 2014, 69: 103−110. doi: 10.1016/j.sysconle.2014.05.001
- Ju, Y.M.; Wei, G.L.; Ding, D.R.; et al. A novel fault detection method under weighted try-once-discard scheduling over sensor networks. IEEE Trans. Control Netw. Syst., 2020, 7: 1489−1499. doi: 10.1109/TCNS.2020.2980362
- Li, X.; Wei, G.L.; Ding, D.R.; et al. Recursive filtering for time-varying discrete sequential systems subject to deception attacks: Weighted try-once-discard protocol. IEEE Trans. Syst. Man Cybern. Syst., 2022, 52: 3704−3713. doi: 10.1109/TSMC.2021.3064653
- Liu, S.; Zhao, X.X.; Tian, E.G.; et al. Distributed recursive filtering under random access protocols: A multirate strategy. Int. J. Robust Nonlinear Control, 2022, 32: 7132−7148. doi: 10.1002/rnc.6187
- Wan, X.B.; Wang, Z.D.; Han, Q.L.; et al. Finite-time H∞ state estimation for discrete time-delayed genetic regulatory networks under stochastic communication protocols. IEEE Trans. Circuits Syst. I Reg. Papers, 2018, 65: 3481−3491. doi: 10.1109/TCSI.2018.2815269
- Han, F.; Song, Y.; Zhang, S.J.; et al. Local condition-based finite-horizon distributed H∞-consensus filtering for random parameter system with event-triggering protocols. Neurocomputing, 2017, 219: 221−231. doi: 10.1016/j.neucom.2016.09.022
- Ge, X.H.; Han, Q.L. Distributed event-triggered H∞ filtering over sensor networks with communication delays. Inf. Sci., 2015, 291: 128−142. doi: 10.1016/j.ins.2014.08.047
- Zhu, S.Y.; Chen, C.L.; Li, W.S.; et al. Distributed optimal consensus filter for target tracking in heterogeneous sensor networks. IEEE Trans. Cybern., 2013, 43: 1963−1976. doi: 10.1109/TSMCB.2012.2236647
- Millán, P.; Orihuela, L.; Vivas, C. et al. Distributed consensus-based estimation considering network induced delays and dropouts. Automatica, 2012, 48: 2726−2729. doi: 10.1016/j.automatica.2012.06.093
- Olfati-Saber, R.; Jalalkamali, P. Coupled distributed estimation and control for mobile sensor networks. IEEE Trans. Autom. Control, 2012, 57: 2609−2614. doi: 10.1109/TAC.2012.2190184
- Han, F.; Wei, G.L.; Ding, D.R.; et al. Local condition based consensus filtering with stochastic nonlinearities and multiple missing measurements. IEEE Trans. Autom. Control, 2017, 62: 4784−4790. doi: 10.1109/TAC.2017.2689722
- Liang, J.L.; Wang, Z.D.; Liu, X.H. Distributed state estimation for discrete-time sensor networks with randomly varying nonlinearities and missing measurements. IEEE Trans. Neural Netw., 2011, 22: 486−496. doi: 10.1109/TNN.2011.2105501
- Shen, B.; Wang, Z.D.; Liu, X.H. A stochastic sampled-data approach to distributed H∞ filtering in sensor networks. IEEE Trans. Circuits Syst. I Reg. Papers, 2011, 58: 2237−2246. doi: 10.1109/TCSI.2011.2112594
- Ding, D.R.; Wang, Z.D.; Dong, H.L.; et al. Distributed H∞ state estimation with stochastic parameters and nonlinearities through sensor networks: The finite-horizon case. Automatica, 2012, 48: 1575−1585. doi: 10.1016/j.automatica.2012.05.070
- Liu, Q.Y.; Wang, Z.D.; He, X.; et al. A resilient approach to distributed filter design for time-varying systems under stochastic nonlinearities and sensor degradation. IEEE Trans. Signal Process., 2017, 65: 1300−1309. doi: 10.1109/TSP.2016.2634541
- Huang, C.; Ho, D.W.C.; Lu, J.Q. Partial-information-based distributed filtering in two-targets tracking sensor networks. IEEE Trans. Circuits Syst. I Reg. Papers, 2012, 59: 820−832. doi: 10.1109/TCSI.2011.2169912
- Song, H.Y.; Yu, L.; Zhang, D. Distributed set-valued estimation in sensor networks with limited communication data rate. J. Frankl Inst., 2013, 350: 1264−1283. doi: 10.1016/j.jfranklin.2013.02.024
- Shen, B.; Wang, Z.D.; Hung, Y.S.; et al. Distributed H∞ filtering for polynomial nonlinear stochastic systems in sensor networks. IEEE Trans. Ind. Electron., 2011, 58: 1971−1979. doi: 10.1109/TIE.2010.2053339
- Zhang, W.A.; Dong, H.; Guo, G.; et al. Distributed sampled-data H∞ filtering for sensor networks with nonuniform sampling periods. IEEE Trans. Ind. Inf., 2014, 10: 871−881. doi: 10.1109/TII.2014.2299897
- Su, X.J.; Wu, L.G.; Shi, P. Sensor networks with random link failures: Distributed filtering for T-S fuzzy systems. IEEE Trans. Ind. Inf., 2013, 9: 1739−1750. doi: 10.1109/TII.2012.2231085
- Matei, I.; Baras, J.S. A linear distributed filter inspired by the Markovian jump linear system filtering problem. Automatica, 2012, 48: 1924−1928. doi: 10.1016/j.automatica.2012.05.028
- Matei, I.; Baras, J.S. Consensus-based linear distributed filtering. Automatica, 2012, 48: 1776−1782. doi: 10.1016/j.automatica.2012.05.042
- Chen, Y.G.; Wang, Z.D.; Alsaadi, F.E.; et al. Dynamic output-feedback H∞ control for discrete time-delayed systems with actuator saturations under round-robin communication protocol. Int. J. Robust Nonlinear Control, 2022, 32: 1703−1720. doi: 10.1002/rnc.5906
- Li, X.F.; Fang, J.A.; Li, H.Y. Finite-time synchronization of memristive neural networks with time-varying delays via two control methods. Math. Meth. Appl. Sci., 2019, 42: 2746−2760. doi: 10.1002/mma.5547
- Liu, A.D.; Zhang, W.A.; Chen, B.; et al. Networked filtering with Markov transmission delays and packet disordering. IET Control Theory Appl., 2018, 12: 687−693. doi: 10.1049/iet-cta.2017.0755
- Wang, Y.Z.; Wang, Z.D.; Zou, L. et al. H∞ proportional-integral state estimation for T-S fuzzy systems over randomly delayed redundant channels with partly known probabilities. IEEE Trans. Cybern., 2022, 52: 9951−9963. doi: 10.1109/TCYB.2020.3036364
- Qian, W.; Xing, W.W.; Fei, S.M. H∞ state estimation for neural networks with general activation function and mixed time-varying delays. IEEE Trans. Neural Netw. Learn. Syst., 2021, 32: 3909−3918. doi: 10.1109/TNNLS.2020.3016120
- Zhao, Z.Y.; Yi, X.J.; Ma, L.F.; et al. Quantized recursive filtering for networked systems with stochastic transmission delays. ISA Trans., 2022, 127: 99−107. doi: 10.1016/j.isatra.2022.05.033
- Sun, Y.; Mao, J.Y.; Liu, H.J.; et al. Distributed recursive filtering for discrete time-delayed stochastic nonlinear systems based on fuzzy rules. Neurocomputing, 2020, 400: 412−419. doi: 10.1016/j.neucom.2019.04.083
- Zhao, Z.Y.; Wang, Z.D.; Zou, L.; et al. Finite-horizon H∞ state estimation for artificial neural networks with component-based distributed delays and stochastic protocol. Neurocomputing, 2018, 321: 169−177. doi: 10.1016/j.neucom.2018.08.031
- Chen, Y.; Wang, Z.D.; Yuan, Y.; Date, P. Distributed H∞ filtering for switched stochastic delayed systems over sensor networks with fading measurements. IEEE Trans. Cybern., 2020, 50: 2−14. doi: 10.1109/TCYB.2018.2852290
- Cloosterman, M.B.G.; Hetel, L.; Van De Wouw, N.; et al. Controller synthesis for networked control systems. Automatica, 2010, 46: 1584−1594. doi: 10.1016/j.automatica.2010.06.017
- Li, J.N.; Er, M.J.; Yu, H.B. Sampling and control strategy: Networked control systems subject to packet disordering. IET Control Theory Appl., 2016, 10: 674−683. doi: 10.1049/iet-cta.2015.0757
- Liu, A.D.; Zhang, W.A.; Yu, L.; et al. New results on stabilization of networked control systems with packet disordering. Automatica, 2015, 52: 255−259. doi: 10.1016/j.automatica.2014.12.006
- Zhang, X.M.; Han, Q.L. Network-based H∞ filtering for discrete-time systems. IEEE Trans. Signal Process., 2012, 60: 956−961. doi: 10.1109/TSP.2011.2175224
- Wang, D.; Wang, Z.D.; Li, G.Y.; et al. Distributed filtering for switched nonlinear positive systems with missing measurements over sensor networks. IEEE Sens. J., 2016, 16: 4940−4948. doi: 10.1109/JSEN.2016.2555761
- Li, B.; Wang, Z.D.; Han, Q.L.; et al. Distributed quasiconsensus control for stochastic multiagent systems under round-robin protocol and uniform quantization. IEEE Trans. Cybern., 2022, 52: 6721−6732. doi: 10.1109/TCYB.2020.3026001
- Zou, L.; Wang, Z.D.; Han, Q.L.; et al. Ultimate boundedness control for networked systems with try-once-discard protocol and uniform quantization effects. IEEE Trans. Autom. Control, 2017, 62: 6582−6588. doi: 10.1109/TAC.2017.2713353
- Yuan, H.H.; Guo, Y.Z.; Xia, Y.Q. Event-based distributed filtering against deception attacks for sensor networks with quantization effect. ISA Trans., 2022, 126: 338−351. doi: 10.1016/j.isatra.2021.08.009
- Li, T.; Xie, L.H. Distributed coordination of multi-agent systems with quantized-observer based encoding-decoding. IEEE Trans. Autom. Control, 2012, 57: 3023−3037. doi: 10.1109/TAC.2012.2199152
- Wang, L.C.; Wang, Z.D.; Han, Q.L.; et al. Synchronization control for a class of discrete-time dynamical networks with packet dropouts: A coding-decoding-based approach. IEEE Trans. Cybern., 2018, 48: 2437−2448. doi: 10.1109/TCYB.2017.2740309
- Wang, L.C.; Wang, Z.D.; Han, Q.L.; et al. Event-based variance-constrained H∞ filtering for stochastic parameter systems over sensor networks with successive missing measurements. IEEE Trans. Cybern., 2018, 48: 1007−1017. doi: 10.1109/TCYB.2017.2671032
- Shen, D.; Zhang, C. Zero-error tracking control under unified quantized iterative learning framework via encoding-decoding method. IEEE Trans. Cybern., 2022, 52: 1979−1991. doi: 10.1109/TCYB.2020.3004187
- Liu, L.; Ma, L.F.; Guo, J.; et al. Distributed set-membership filtering for time-varying systems: A coding-decoding-based approach. Automatica, 2021, 129: 109684. doi: 10.1016/j.automatica.2021.109684
- Wang, L.C.; Wang, Z.D.; Zhao, D.; et al. Event-based state estimation under constrained bit rate: An encoding-decoding approach. Automatica, 2022, 143: 110421. doi: 10.1016/j.automatica.2022.110421
- Suo, J.H.; Li, N. Observer-based synchronisation control for discrete-time delayed switched complex networks with coding-decoding approach. Int. J. Syst. Sci., 2022, 53: 2711−2728. doi: 10.1080/00207721.2022.2083257
- Jiang, B.; Dong, H.L.; Shen, Y.X.; et al. Encoding-decoding-based recursive filtering for fractional-order systems. IEEE/CAA J. Autom. Sin., 2022, 9: 1103−1106. doi: 10.1109/JAS.2022.105644
- Movaghati, S.; Ardakani, M. Optimum bit-sensor assignment for distributed estimation in inhomogeneous sensor networks. IEEE Commun. Lett., 2014, 18: 668−671. doi: 10.1109/LCOMM.2014.012114.132638
- Gao, Y.T.; Ma, L.F.; Zhang, M.J.; et al. Distributed set-membership filtering for nonlinear time-varying systems with dynamic coding-decoding communication protocol. IEEE Syst. J., 2022, 16: 2958−2967. doi: 10.1109/JSYST.2021.3063357
- Wen, P.Y.; Li, X.R.; Hou, N.; et al. Distributed recursive fault estimation with binary encoding schemes over sensor networks. Syst. Sci. Control Eng., 2022, 10: 417−427. doi: 10.1080/21642583.2022.2063203
- Zou, L.; Wang, Z.D.; Hu, J.; et al. Communication-protocol-based analysis and synthesis of networked systems: Progress, prospects and challenges. Int. J. Syst. Sci., 2021, 52: 3013−3034. doi: 10.1080/00207721.2021.1917721
- Walsh, G.C.; Ye, H.; Bushnell, L.G. Stability analysis of networked control systems. IEEE Trans. Control Syst. Technol., 2002, 10: 438−446. doi: 10.1109/87.998034
- Zhu, K.Q.; Hu, J.; Liu, Y.R.; et al. On l2-l∞ output-feedback control scheduled by stochastic communication protocol for two-dimensional switched systems. Int. J. Syst. Sci., 2021, 52: 2961−2976. doi: 10.1080/00207721.2021.1914768
- Zou, L.; Wang, Z.D.; Han, Q.L.; et al. Recursive filtering for time-varying systems with random access protocol. IEEE Trans. Autom. Control, 2019, 64: 720−727.
- Qu, F.R.; Zhao, X.; Wang, X.M.; et al. Probabilistic-constrained distributed fusion filtering for a class of time-varying systems over sensor networks: A torus-event-triggering mechanism. Int. J. Syst. Sci., 2022, 53: 1288−1297. doi: 10.1080/00207721.2021.1998721
- An, W.J.; Zhao, P.F.; Liu, H.J.; et al. Distributed multi-step subgradient projection algorithm with adaptive event-triggering protocols: A framework of multiagent systems. Int. J. Syst. Sci., 2022, 53: 2758−2772. doi: 10.1080/00207721.2022.2063967
- Meng, M.Y.; Chen, T.W. Event based agreement protocols for multi-agent networks. Automatica, 2013, 49: 2125−2132. doi: 10.1016/j.automatica.2013.03.002
- Suo, J.H.; Li, N.; Li, Q. Event-triggered H∞ state estimation for discrete-time delayed switched stochastic neural networks with persistent dwell-time switching regularities and sensor saturations. Neurocomputing, 2021, 455: 297−307. doi: 10.1016/j.neucom.2021.01.131
- Li, N.; Li, Q.; Suo, J.H. Dynamic event-triggered H∞ state estimation for delayed complex networks with randomly occurring nonlinearities. Neurocomputing, 2021, 421: 97−104. doi: 10.1016/j.neucom.2020.08.048
- Shen, Y.X.; Wang, Z.D.; Dong, H.L.; et al. Dynamic event-based recursive filtering for multirate systems with integral measurements over sensor networks. Int. J. Robust Nonlinear Control, 2022, 32: 1374−1392. doi: 10.1002/rnc.5884
- Liu, J.L.; Gu, Y.Y.; Cao, J.; et al. Distributed event-triggered H∞ filtering over sensor networks with sensor saturations and cyber-attacks. ISA Trans., 2018, 81: 63−75. doi: 10.1016/j.isatra.2018.07.018
- Tan, Y.S.; Xiong, M.H.; Niu, B.; et al. Distributed hybrid-triggered H∞ filter design for sensor networked systems with output saturations. Neurocomputing, 2018, 315: 261−271. doi: 10.1016/j.neucom.2018.07.022
- Wan, X.B.; Wang, Z.D.; Wu, M.; et al. H∞ state estimation for discrete-time nonlinear singularly perturbed complex networks under the round-robin protocol. IEEE Trans. Neural Netw. Learn. Syst., 2019, 30: 415−426. doi: 10.1109/TNNLS.2018.2839020
- Yin, X.Y.; Li, Z.J.; Zhang, L.X. et al. Distributed state estimation of sensor-network systems subject to Markovian channel switching with application to a chemical process. IEEE Trans. Syst. Man Cybern. Syst., 2018, 48: 864−874. doi: 10.1109/TSMC.2016.2632155
- Hu, J.; Wang, Z.D.; Liang, J.L.; et al. Event-triggered distributed state estimation with randomly occurring uncertainties and nonlinearities over sensor networks: A delay-fractioning approach. J. Franklin Inst., 2015, 352: 3750−3763. doi: 10.1016/j.jfranklin.2014.12.006
- Zhang, D.; Yu, L.; Zhang, W.A. Energy efficient distributed filtering for a class of nonlinear systems in sensor networks. IEEE Sens. J., 2015, 15: 3026−3036. doi: 10.1109/JSEN.2014.2386348
- Chen, B.S.; Zhang, W.H. Stochastic H2/H∞ control with state-dependent noise. IEEE Trans. Autom. Control, 2004, 49: 45−57. doi: 10.1109/TAC.2003.821400
- Bernstein, D.S.; Haddad, W.M. LQG control with an H∞ performance bound: A Riccati equation approach. IEEE Trans. Autom. Control, 1989, 34: 293−305. doi: 10.1109/9.16419
- Zhang, W.H.; Huang, Y.L.; Zhang, H.S. Stochastic H2/H∞ control for discrete-time systems with state and disturbance dependent noise. Automatica, 2007, 43: 513−521. doi: 10.1016/j.automatica.2006.09.015
- Shi, Y.B.; Wang, J.H.; Fang, X.K.; et al. Robust mixed H2/H∞ control for an uncertain wireless sensor network systems with time delay and packet loss. Int. J. Control Autom. Syst., 2021, 19: 88−100. doi: 10.1007/s12555-018-0508-9
- Liu, L.; Zhou, W.J.; Fei, M.R.; et al. Distributed fusion estimation for stochastic uncertain systems with network-induced complexity and multiple noise. IEEE Trans. Cybern., 2022, 52: 8753−8765. doi: 10.1109/TCYB.2021.3059367
- Chen, B.; Hu, G.Q.; Zhang, W.A.; et al. Distributed mixed H2/H∞ fusion estimation with limited communication capacity. IEEE Trans. Autom. Control, 2016, 61: 805−810. doi: 10.1109/TAC.2015.2450271
- Chen, C.Y.; Dong, W.J.; Djapic, V. Distributed H2/H∞ filtering over infinite horizon. Int. J. Adapt. Control Signal Process., 2018, 32: 330−343. doi: 10.1002/acs.2847
- Liu, H.J.; Wang, Z.D.; Fei, W.Y.; et al. H∞ and l2/l∞ state estimation for delayed memristive neural networks on finite horizon: The round-robin protocol. Neural Netw., 2020, 132: 121−130. doi: 10.1201/9781003189152-10
- Zhao, D.; Wang, Z.D.; Wei, G.L.; et al. l2/l∞ proportional-integral observer design for systems with mixed time-delays under round-robin protocol. Int. J. Robust Nonlinear Control, 2021, 31: 887−906. doi: 10.1002/rnc.5328
- Zou, L.; Wang, Z.D.; Dong, H.L.; et al. Energy-to-peak state estimation with intermittent measurement outliers: The single-output case. IEEE Trans. Cybern., 2022, 52: 11504−11515. doi: 10.1109/TCYB.2021.3057545
- Rotea, M.A. The generalized H2 control problem. Automatica, 1993, 29: 373−385. doi: 10.1016/0005-1098(93)90130-L
- Chen, Y.; Chen, C.; Xue, A.K. Distributed non-fragile l2-l∞ filtering over sensor networks with random gain variations and fading measurements. Neurocomputing, 2019, 338: 154−162. doi: 10.1016/j.neucom.2018.12.008
- Shen, H.; Xing, M.P.; Wu, Z.G.; et al. l2/l∞ state estimation for persistent dwell-time switched coupled networks subject to round-robin protocol. IEEE Trans. Neural Netw. Learn. Syst., 2021, 32: 2002−2014. doi: 10.1109/TNNLS.2020.2995708
- Kalman, R.E. A new approach to linear filtering and prediction problems. J. Basic Eng., 1960, 82: 35−45. doi: 10.1115/1.3662552
- Olfati-Saber, R. Distributed Kalman filtering for sensor networks. In Proceeding of the 46th IEEE Conference on Decision and Control, New Orleans, USA, 12–14 December 2007; IEEE: New Orleans, LAUSA, 2007; pp. 5492–5498. doi: 10.1109/CDC.2007.4434303
- Olfati-Saber, R.; Shamma, J.S. Consensus filters for sensor networks and distributed sensor fusion. In Proceeding of the 44th IEEE Conference on Decision and Control, Seville, Spain, 15 December 2005; IEEE: Seville, Spain, 2005; pp. 6698–6703. doi: 10.1109/CDC.2005.1583238
- Olfati-Saber, R. Kalman-consensus filter: Optimality, stability, and performance. In Proceeding of the 48th IEEE Conference on Decision and Control (CDC) Held Jointly with 2009 28th Chinese Control Conference, Shanghai, China, 15–18 December 2009; IEEE: Shanghai, China, 2009; pp. 7036–7042. doi: 10.1109/CDC.2009.5399678
- Xie, L.H.; Soh, Y.C.; De Souza, C.E. Robust Kalman filtering for uncertain discrete-time systems. IEEE Trans. Autom. Control, 1994, 39: 1310−1314. doi: 10.1109/9.293203
- Fu, M.Y.; De Souza, C.E.; Luo, Z.Q. Finite-horizon robust Kalman filter design. IEEE Trans. Signal Process., 2001, 49: 2103−2112. doi: 10.1109/78.942638
- Song, W.H.; Wang, J.N.; Wang, C.Y.; et al. A variance-constrained approach to event-triggered distributed extended Kalman filtering with multiple fading measurements. Int. J. Robust Nonlinear Control, 2019, 29: 1558−1576. doi: 10.1002/rnc.4456
- Su, H.S.; Li, Z.H.; Ye, Y.Y. Event-triggered Kalman-consensus filter for two-target tracking sensor networks. ISA Trans., 2017, 71: 103−111. doi: 10.1016/j.isatra.2017.06.019
- Li, Q.; Shen, B.; Wang, Z.D.; et al. Recursive distributed filtering over sensor networks on Gilbert-Elliott channels: A dynamic event-triggered approach. Automatica, 2020, 113: 108681. doi: 10.1016/j.automatica.2019.108681
- Han, F.; Wang, Z.D.; Dong, H.L.; et al. A local approach to distributed H∞-consensus state estimation over sensor networks under hybrid attacks: Dynamic event-triggered scheme. IEEE Trans. Signal Inf. Proc. Netw., 2022, 8: 556−570. doi: 10.1109/TSIPN.2022.3182273
- Dong, H.L.; Bu, X.Y.; Hou, N.; et al. Event-triggered distributed state estimation for a class of time-varying systems over sensor networks with redundant channels. Inf. Fusion, 2017, 36: 243−250. doi: 10.1016/j.inffus.2016.12.005
- Wen, C.B.; Wang, Z.D.; Geng, T.; et al. Event-based distributed recursive filtering for state-saturated systems with redundant channels. Inf. Fusion, 2018, 39: 96−107. doi: 10.1016/j.inffus.2017.04.004
- Bu, X.Y.; Dong, H.L.; Han, F.; et al. Distributed filtering for time-varying systems over sensor networks with randomly switching topologies under the round-robin protocol. Neurocomputing, 2019, 346: 58−64. doi: 10.1016/j.neucom.2018.07.087
- Sheng, L.; Niu, Y.C.; Gao, M. Distributed resilient filtering for time-varying systems over sensor networks subject to round-robin/stochastic protocol. ISA Trans., 2019, 87: 55−67. doi: 10.1016/j.isatra.2018.11.012
- Han, F.; Wang, Z.D.; Chen, G.R.; et al. Scalable consensus filtering for uncertain systems over sensor networks with round-robin protocol. Int. J. Robust Nonlinear Control, 2021, 31: 1051−1066. doi: 10.1002/rnc.5327
- Chen, S.; Ma, L.F.; Ma, Y.Q. Distributed set-membership filtering for nonlinear systems subject to round-robin protocol and stochastic communication protocol over sensor networks. Neurocomputing, 2020, 385: 13−21. doi: 10.1016/j.neucom.2019.11.056
- Wei, G.L.; Liu, S.; Wang, L.C.; et al. Event-based distributed set-membership filtering for a class of time-varying non-linear systems over sensor networks with saturation effects. Int. J. Gen. Syst., 2016, 45: 532−547. doi: 10.1080/03081079.2015.1106738
- Zhao, Z.Y.; Wang, Z.D.; Zou, L.; et al. Event-triggered set-membership state estimation for complex networks: A zonotopes-based method. IEEE Trans. Netw. Sci. Eng., 2022, 9: 1175−1186. doi: 10.1109/TNSE.2021.3137320
- Pak, J.M.; Ahn, C.K.; Shi, P.; et al. Distributed hybrid particle/FIR filtering for mitigating NLOS effects in TOA-based localization using wireless sensor networks. IEEE Trans. Ind. Electron., 2017, 64: 5182−5191. doi: 10.1109/TIE.2016.2608897
- Song, W.H.; Wang, Z.D.; Wang, J.N.; et al. Distributed auxiliary particle filtering with diffusion strategy for target tracking: A dynamic event-triggered approach. IEEE Trans. Signal Process., 2021, 69: 328−340. doi: 10.1109/TSP.2020.3042947
- Gu, D.B.; Sun, J.X.; Hu, Z.; et al. Consensus based distributed particle filter in sensor networks. In Proceedings of IEEE International Conference on Information and Automation, Changsha, China, 20–23 June 2008; IEEE: Changsha, China, 2008; pp. 302–307. doi: 10.1109/ICINFA.2008.4608015
- Mohammadi, A.; Asif, A. Distributed particle filter implementation with intermittent/irregular consensus convergence. IEEE Trans. Signal Process., 2013, 61: 2572−2587. doi: 10.1109/TSP.2013.2245123
- Yoo, J.; Kim, W.; Kim, H.J. Distributed estimation using online semi-supervised particle filter for mobile sensor networks. IET Control Theory Appl., 2015, 9: 418−427. doi: 10.1049/iet-cta.2014.0495
- Xia, N.; Yang, F.W.; Han, Q.L. Distributed event-triggered networked set-membership filtering with partial information transmission. IET Control Theory Appl., 2017, 11: 155−163. doi: 10.1049/iet-cta.2016.0781
- Yang, F.W.; Xia, N.; Han, Q.L. Event-based networked islanding detection for distributed solar PV generation systems. IEEE Trans. Ind. Inform., 2017, 13: 322−329. doi: 10.1109/TII.2016.2607999
- Liu, S.C.; Liu, P.X. Distributed model-based control and scheduling for load frequency regulation of smart grids over limited bandwidth networks. IEEE Trans. Ind. Inform., 2018, 14: 1814−1823. doi: 10.1109/TII.2017.2766666


