
Downloads
 Download
Download






This work is licensed under a Creative Commons Attribution 4.0 International License.
Highlights
Linear State Estimation for Multi-rate NCSs With Multi-channel Observation Delays and Unknown Markov Packet Losses
Zhenglu Sun and Chunyan Han *
School of Electrical Engineering, University of Jinan, Jinan, 250022, China
* Correspondence: cyhan823@hotmail.com
Received: 19 October 2023
Accepted: 27 November 2024
Published: 25 March 2025
Abstract: This paper is concerned with the linear minimum mean square error estimation (LMMSE) for the multi-rate sampling systems with multi-channel observation delays and unknown Markovian packet losses. The original system is firstly transformed into a single-rate jumping parameter system with multi-channel and delay-free observations by employing the lifting technique and introducing a set of reorganized observations and Markov chains. Then, the single-rate system is converted into a general linear system without delays by defining a new group of extended states. Based on the innovation analysis method, a liner minimum mean square error estimator is developed, and the estimator gain is obtained in terms of generalized Riccati difference equations based on a set of coupled Lyapunov equations. Therefore, the original state estimation problem is solved via the jumping parameter property. Finally, the convergence of the Riccati equation is analyzed and a stationary filter is obtained. The novelty of this paper lies in the introduction of the reorganized observations and multi-state Markov chains.
Keywords:
linear estimation markov packet losses observation delay reorganization observation methods1. Introduction
With the development and progress of the control science, the networked control system (NCS) has become a popular research topic due to its wide applications in various practical areas, such as fault warning [1], target tracking [2], power grids [3, 4], transportation [5], and energy storage [6]. However, since the NCS transmits information through the communication network, the limited bandwidth inevitably leads to unreliability of the transmission channel, such as transmission delays and data losses [7−11]. In recent years, state estimation for the NCSs has attracted much attention with fruitful results reported in the literature such as the filter [12, 13], Kalman filter [14, 15], set membership filter [16, 17], and moving horizon estimator [18, 19].
As it is well known, in the practical industrial systems, the production process is always influenced by nonlinear factors. Nevertheless, in the modeling process of real industrial systems, the system model should be designed as simple as possible to maintain the essential system characteristics and facilitate system analysis and synthesis. Therefore, the linear system model is employed to characterize the basic features of practical systems such as companding signal processors [20], mixing tank systems [21] and direct current motors [22], where the influence of nonlinear factors on the system is not significant. In this paper, we focus on the optimal filtering for linear NCSs with delays and packet losses.
As for state estimation of discrete systems with time delays, some classical techniques have been developed such as the state augmentation method [23], polynomial method [24], reorganized innovation analysis method [25] and linear matrix inequality (LMI) algorithm [26, 27]. For state estimation of systems with packet losses, the packet loss is usually characterized by the Bernoulli process [28] or the Markov process [29], and the estimator design can borrow ideas from the estimator design for Markov jump linear systems (MJLSs) and multiplicative noise systems [30]. Actually, the NCSs with random transmission delays can also be transformed into systems with packet losses and transmission delays [31−37].
On the other hand, the multi-rate sampling system, which has shown great importance in improving estimation performance and energy conservation, has been applied to replace the traditional NCSs in a wide variety of fields, such as signal storage [38], transmission [39] and processing [40]. Up to now, there has been numerous results for the single-rate sampling systems, but such results cannot be extended to deal with the multi-rate sampling systems directly, which motivates the investigation of state estimation for the multi-rate sampled systems [41−44]. For the multi-rate uniform sampling system, the lifting technique and state augmentation method have been used in [45] to transform the multi-rate system into an equivalent single-rate system, and then an LMMSE has been designed for the augmented state. In [46], a novel “sampled output augmentation” method has been developed to deal with delayed and infrequent primary measurements by designing a multi-rate Kalman filter. The equivalence has been verified between the proposed method and the traditional fixed-lag smoothing method. For the random multi-rate sampling system [47], a new state model has been developed to describe the dynamics of the measurement sampling points during the state update period. By applying the innovation analysis methods, a non-augmented state estimator has been designed which is dependent on the data loss rate.
Unlike the filter design of single-rate sampling systems, the state estimation of multi-rate sampling systems becomes more complicated accounting for the different sampling periods of sensor components. In summary, so far, the state estimation has not been fully studied for NCSs with multi-channel observation delays and multiple unknown Markov packet losses, especially for the unreliable multi-rate sampling system, which is worthy of further studies.
Motivated by the above analysis, the purpose of this paper is to design a linear state estimator for multi-rate sampling systems with unknown multi-channel Markov packet losses and observation delays. A new set of two-state Markov chains is introduced to characterize the multi-channel packet losses. The original multi-rate sampling system is firstly transformed into a single-rate sampling system with packet losses and observation delays by the lifting technique, and further converted into a Markov jumping parameter system with multi-channel and delay-free observations by using the reorganization observation technique and introducing a new set of multi-mode Markov chains. Since the original packet loss is unknown, the realization of the Markov chain in the converted models is unknown. A new set of states is defined which contains both the original system state and the indicator functions of the new Markov chains. Based on such states, an LMMSE is derived on the basis of the innovation analysis method, where the estimator gain is given in light of a set of generalized coupled difference Riccati equations (GCDREs) with a set of coupled Lyapunov equations. So the original state estimation can be obtained through the characteristics of jump parameters. It can be proven that under appropriate assumptions, the GCDREs converge to a set of generalized coupled algebraic Riccati equations (GCAREs), resulting in a stationary filter. The stationary filter gains can be performed off-line. Finally, the effectiveness of this algorithm is verified through a simulation example. The main novelties of the current research work can be summarized as the following aspects.
1) The state estimation problem for multi-rate systems with multi-channel observation delays and unknown Markov packet losses is considered.
2) The lifting technique and the reorganization observation technique are used to transform the original system into a single-rate and delay-free one.
3) A new set of Markov chains is introduced to characterize the multi-channel packet losses.
4) The proposed algorithm is recursive and suitable for offline calculation.
The remainder of this paper is organized as follows. In Section 2, the problem statement and some preliminaries are given. In Section 3, the LMMSE is developed based on the innovation analysis method. In Section 4, the convergence analysis is given and a stationary filter is obtained. Finally, Section 5 provides a numerical example, and Section 6 draws some conclusions.
Notations: Throughout this paper, denotes the -dimensional Euclidean space, represents the norm bounded linear space of all matrices. Moreover, diag means a block-diagonal matrix. For , stands for the transpose of . indicates the mathematical expectation operator, stands for the Dirac measure, and means the occurrence probability of an event.
2. Problem Formulation and Preliminaries
2.1. Problem Formulation
Consider the following multi-rate sampling data system with multi-channel Markov packet dropouts and observation delays:
where is the state sequence, is the measurement dropout sequence, is the process noise, and , is the measurement noise in the th channel. and , are matrices of appropriate dimensions. The random variables () are employed to describe the observation dropout,, and each is modeled as a time-homogeneous two-state Markov chain with the following transition probability matrix (TPM):
where is the recovery rate and is the failure rate. Denote
Assume that . Then, there exists the limit probability distribution with
Assumption 1: The initial state , and , , are null mean white noises with covariance matrices , and , respectively. , and () are mutually independent.
Assumption 2: are mutually independent.
The estimation problem considered in this paper can be formulated as follows.
Problem: Given system (1)-(2), we aim to derive an LMMSE estimator such that
is minimized, while the estimator gains are deterministic.
2.2. System Transformation
In this part, we first transform the multi-rate sampling data system into a single-rate system with multi-channel observation delays and packet losses by the lifting technique.
By iterating (1) after steps, the state update at the measurement sampling instant can be established as follows:
where
and the new system noise is defined as
The statistical properties of the system noise can be computed by
Next, we employ the reorganization observation method to transform the multi-channel observation delay system into a delay-free one. In view of the definition of , we rearrange the received multi-channel observations to eliminate the hindrance of the observation delay. A new sequence without delays is constructed as
Then, and are the delay-free observations which satisfy
where
with and being white noises with zero means and following covariances:
Moreover, we introduce a set of new multi-mode Markov chains to convert the delay-free system (9) and (10) into a Markov jumping parameter system. This method is named as the reorganization Markov chain method.
For ,
where the jumping variable is specified by the following equations:
with .
The TPM for the Markov process is denoted as which is given by
Moreover, denote the distribution of as
has the following unique stationary distribution:
which satisfies for , and
For ,
where the jumping variables are specified by the following equations:
with .
The TPM for the Markov process is denoted as which satisfies
In addition, define the distribution of as
has the following unique stationary distribution:
which satisfies for , and
3. Design of the LMMSE Filter
Note that the packet loss in each channel is unknown, so the jumping parameters are unknown at the present time. In this paper, we will estimate the state and Markov chains synchronously by introducing the following stochastic variables:
where represents the indicator function.
In view of (27) and (28), the new state equation can be written as the following compact form.
(i) For ,
Then, we have
where
(ii) For ,
Then, we have
where
Therefore, the newly constructed state can be estimated directly.
The observations are further transformed into the following forms:
with
Thus, the LMMSE estimation problem for system (1)–(2) is transformed into the one for (1), (29) and (30). Before starting the design, some new definitions and notations are introduced.
Definition 3.1: Given the time for , the LMMSE predictor is defined as the projection of onto the following linear space:
For , the LMMSE predictor is defined as the projection of onto the following linear space:
Definition 3.2: Define the one-step prediction as the projection of onto the linear space of (31), and is the projection of onto the linear space of (32). Denote the corresponding innovation sequences as
then we can say that and are in fact mutually independent zero mean processes, which span the same linear space as in (31) and (32). Furthermore, we define
Define
The second-order moment matrices of the augmented states and the corresponding innovation sequences are given below.
Lemma 3.1: The second-order moment matrices and are diagonal matrices, which can be calculated as follows.
For , the matrix satisfies
where the initial value is
For , the matrix satisfies
Proof: See appendix A.
Denote
and define the operators
by
then the coupled Lyapunov equation can be rewritten as
Lemma 3.2: The second moment matrices and satisfy the following equations:
Proof: See Appendix B.
Now, we are in the position to derive the main results of this paper. The covariance matrices of the estimation errors are given by the following theorem.
Theorem 3.1: The covariance matrices and can be formulated as follows.
(i) For , satisfies the following GCDRE:
where the initial value is
and
(ii) For , satisfies the following GDCRE:
where
Proof: See Appendix C.
On the basis of Theorem 3.1, we will design the LMMSE estimator of by the innovation analysis method.
Theorem 3.2: Consider the multi-rate sampling system (1) and (2). The LMMSE is given by
where is the -th block element of , which can be obtained iteratively by the following steps.
(i) For , can be calculated by the following difference equation with the initial value and
(ii) For , can be computed by the following recursive equation:
Proof: On the ground of the relationship between , and , the proof follows easily from the derivation process of Theorem 3.1, and is therefore omitted here.
Note that Theorem 3.2 supply the state estimator at the measurement sampling time, but the estimator at the state update instant is not supplied.
Theorem 3.3: The original state estimator at the states update instant has the following form:
where
Proof: On the basis of the iteration of in (6) and the projection of on the linear space , we directly have the predictor of the state at instant .
4. Stationary Linear Filter
In this section, we will show that the GCDREs ( and ) converge to a set of GCAREs when . Then, we develop a stationary filter according to the obtained GCAREs. First, some definitions and assumptions need to be made.
Definition 4.1 [30]: We say that system (1) is mean square stable (MSS) with , if as for any initial condition satisfying .
Assumption 4.1: System (1) is MSS according to Definition 4.1.
Assumption 4.2: The Markov chain is ergodic.
Furthermore, we introduce the following GCAREs:
Next, we will prove that GCDREs (62) and (64) converge to GCAREs (73) and (74), respectively, and there exists a set of positive semidefinite solutions to GCAREs (62) and (64). It can be seen that if the GCDRE (62) for () converges, then after finite iterations, (64) converges to (74) as well. In addition, if there is a stable solution to (73), there is also a stable solution to (74). Therefore, it is only necessary for us to prove the convergence of (62) and find the existence condition for the stable solution to (73).
Based on the Proposition 3.36 in [30], and in light of Assumptions 4.1 and 4.2, we have as , where is the unique solution to the following coupled algebraic Lyapunov equation:
In what follows, for any matrix , define as
Recalling from (73), we make the following definition:
Substituting (77) into (62) yields the following form:
Notice from Lemma 3.2 that the inverse matrix of is well defined since
The following is the main result of this section where the core task is to establish the asymptotic convergence of . Before that, we need to present two auxiliary results.
Let be given such that holds for all . Define
Obviously, for , we have
Define with and
Recalling the definition of in (75), we obtain the following result.
Lemma 4.1: and for each , , we have
Proof: See Appendix D.
Define
where . Notice that from Lemma 3.2, the inverse matrix of is well defined.
Lemma 4.2: For each , , we have
Proof: See Appendix E.
In the following theorem, we first demonstrate the existence of a unique positive semi-definite solution to for the GCARE. Then, we prove that for a positive integer , there exist lower and upper bounds and on such that asymptotically converges to .
Theorem 4.1: Suppose that the Markov chain is ergodic and system (1)-(2) is MSS. For any with and , given by (58) and (62) satisfies
where is the unique positive semidefinite solution to the following GARE:
Moreover,
Proof: See Appendix F.
Corollary 4.1: The stationary LMMSE filter is
where is the -th block element of which can be obtained iteratively by the following steps.
(i) For , can be calculated by the following difference equation:
(ii) For , can be calculated as follows:
Proof: From Theorem 4.2, it can be obtained that the error covariance of the infinite time state estimator converges to a unique solution. Therefore, the result can be obtained immediately by replacing the error covariances in (66) and (69) with the stable solution in the Theorem 4.2.
Corollary 4.2: The infinite time estimator at the state update instant has the following form:
where
Proof: For , we have formulas (90) and (91) by calculating the projection of formula (92) on linear space . This completes the proof.
5. Numerical Example
Consider the following linear discrete-time system:
where and are white noises with zero means and covariance matrices and , respectively. Set the initial value and its covariance matrix to be
Let the channel packet loss parameters be
For the proposed optimal state estimator, 50 Monte Carlo experiments are carried out and the following simulation results are obtained. Figures 1 and 2 show the path of the Markov packet loss in two periods. Figure 3 shows the trajectory of the real and its estimated value of the first component of . Figure 4 shows the trajectory of the real state and the estimated value of the second component of . From the simulation results, it can be seen that the filter derived in this paper has good tracking performances.
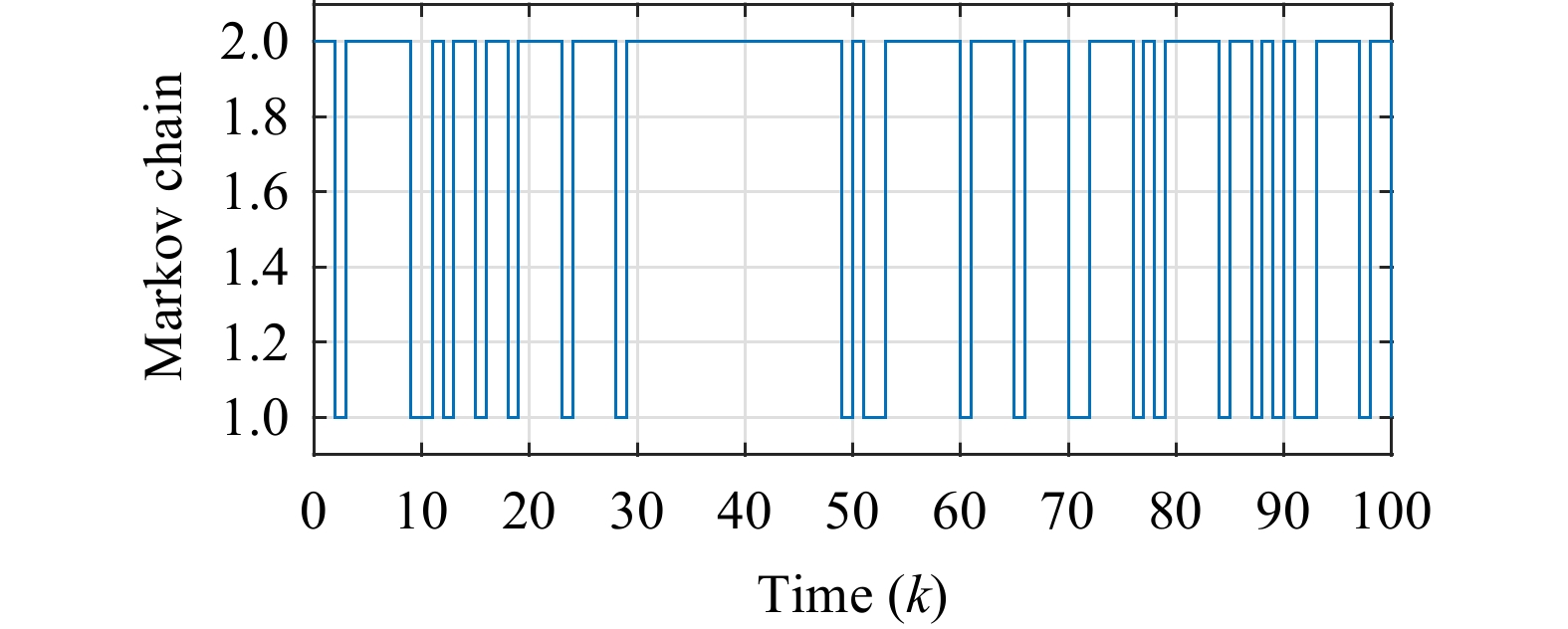
Figure 1. An sample path of packet loss of the first channel.
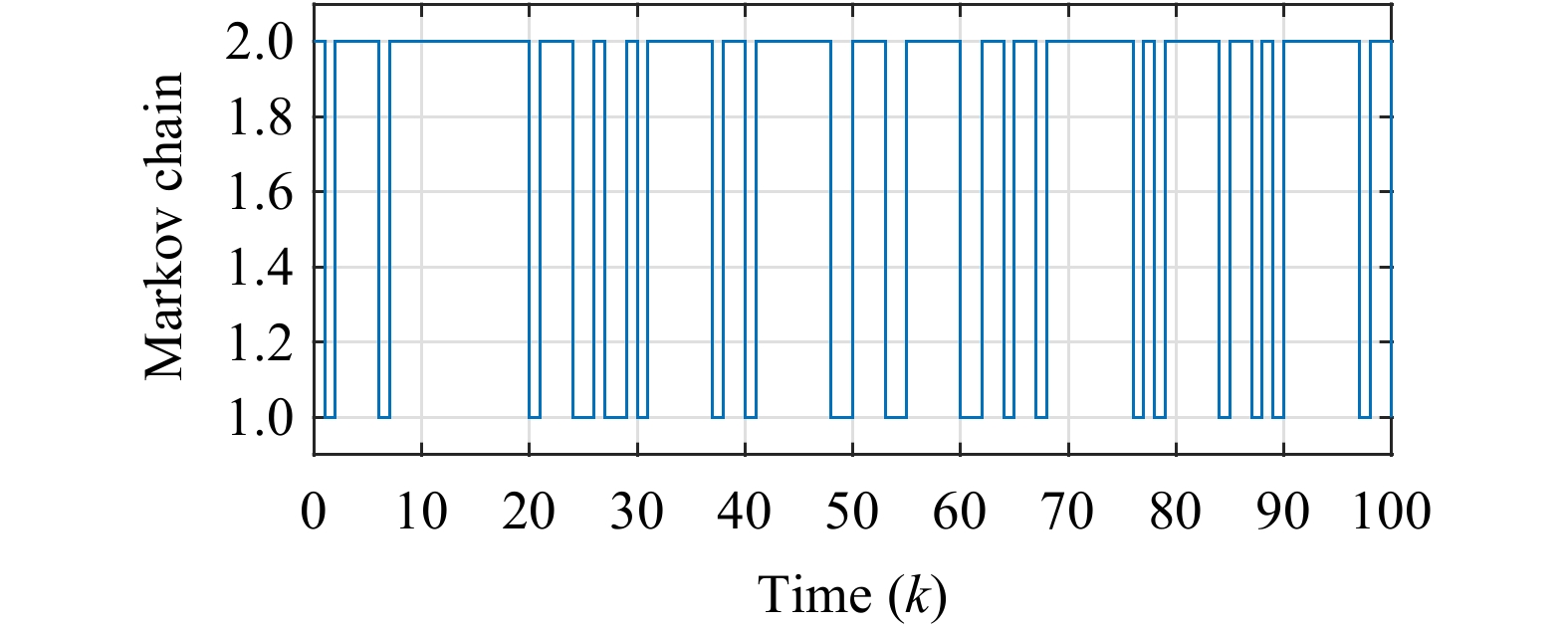
Figure 2. An sample path of packet loss of the second channel.
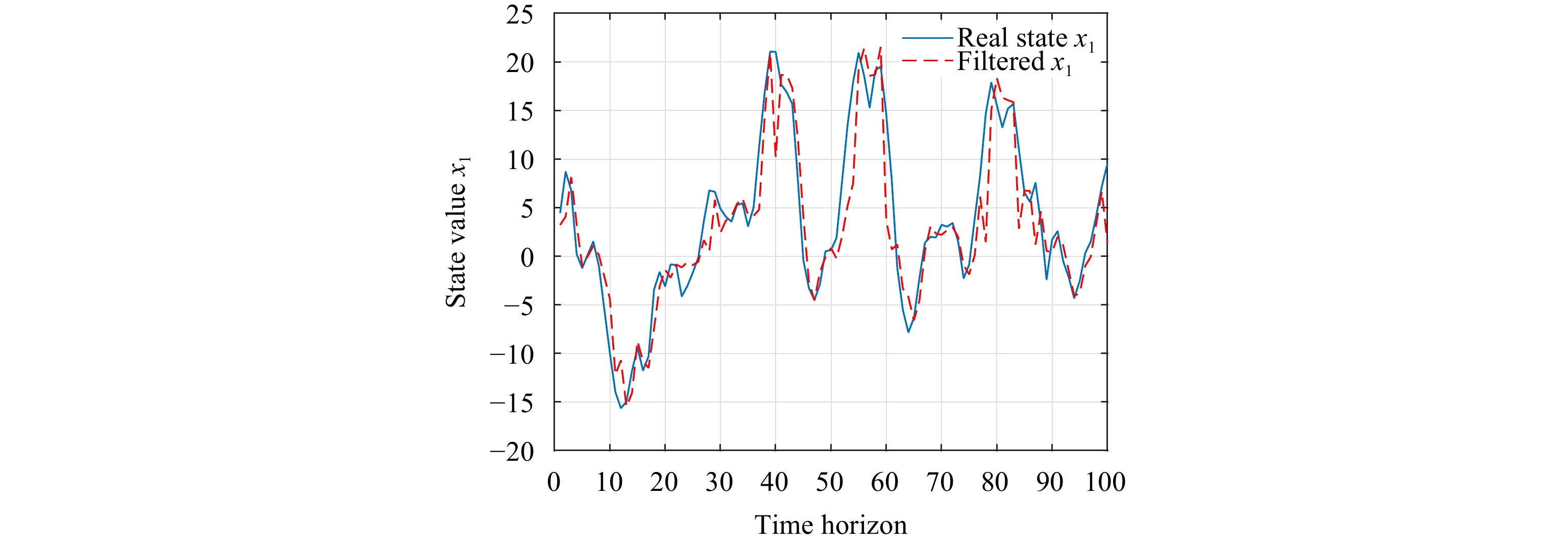
Figure 3. Simulation of the state value (blue line) and estimation (red line) of the first state component trajectory .
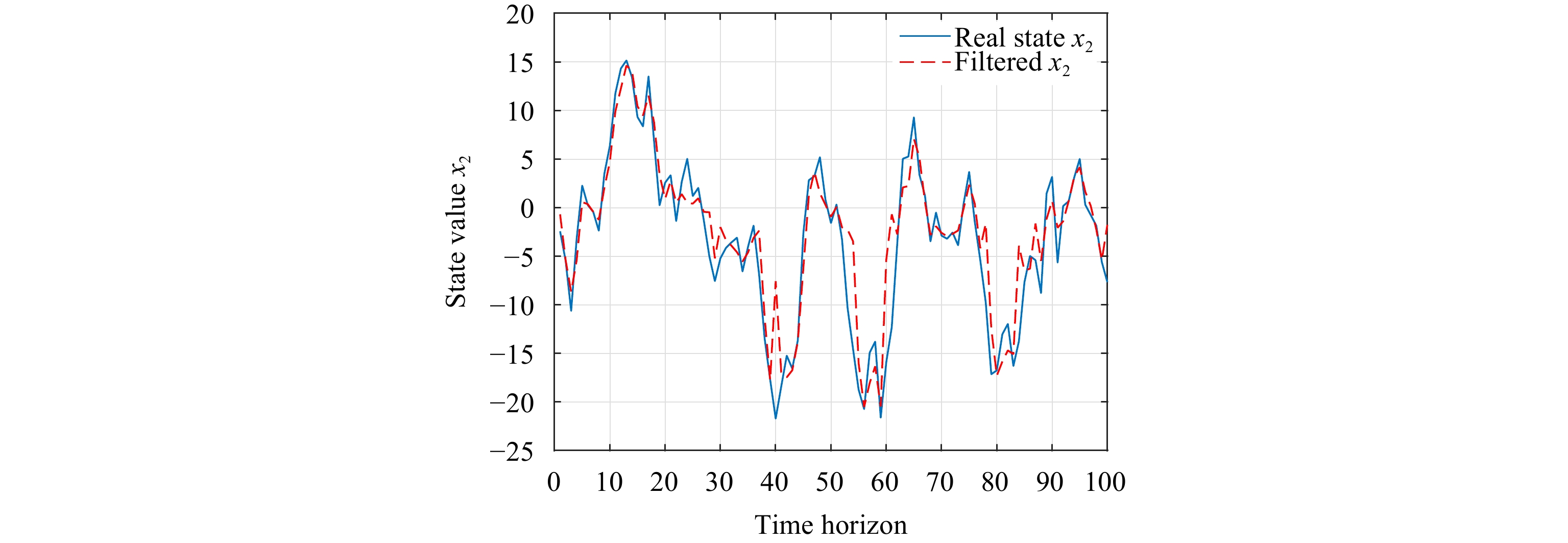
Figure 4. Simulation of the state value (blue line) and estimation (red line) of the first state component trajectory .
6. Conclusion
This paper has mainly studied the linear state estimation problem of multi-rate sampling systems with erasure channels. For the multi-channel packet loss with unknown Markov jump parameters, a new Markov chain has been established to simulate the random packet loss process. By introducing some new state variables and using the reorganization technology, the original system model has been transformed into a delay-free Markov jump system. Then, a set of GDREs has been conducted based on the Lyapunov equations with analytical solutions obtained. Finally, convergence analysis has been conducted and a stationary filter has been obtained.
Data Availability Statement
This article does not include any new data, as no data were created or analyzed in this study.
Appendix A. Proof of Lemma 3.1
Proof: From (31), it can be shown that the following Lyapunov-like recurrent equation for the second moment matrix holds where .
Here, the initial value is for .
Similarly, (47) can be obtained. The proof is completed.
Appendix B. Proof of Lemma 3.2
Proof: In view of (35)-(36) and the projection theorem, it can be obtained that
Then, it can be deduced from (39) and (40) that
By the definitions of and , we have
This completes the proof.
Appendix C. Proof of Theorem 3.1
Proof: We first consider the case of . Define as the projection of onto the linear space . Based on the projection formula, we have
From (96), we have
Substituting (101) into (100), we have
On the other hand, it can be seen from (32) that
From Assumptions 1-2, we have
with
In view of (32), (102) and (104), we obtain
Setting
we have
On the ground of the assumptions given in Section 2, we have
Furthermore, the covariance matrices of , , can be derived as follows:
In light of (108)–(114), the GCDRE can be obtained as follows:
(64) follows immediately from the similar derivation line of . This completes the proof.
Appendix D. Proof of Lemma 4.1
Proof: Let us now show (82) by the mathematical induction method. For , the result is obvious, since and . Suppose that (82) holds for . Then, from (80) and (82), we have
(82) is shown by the mathematical induction method.
Appendix E. Proof of Lemma 4.2
Proof: Let us show (84) by the mathematical induction method. Set
If , it follows from (80) and (82) that
Obviously, , showing that holds for all , . Similarly, if , from (80) and (82), we have
Since , the induction argument is completed for (84).
Appendix F. Proof of Theorem 4.1
Proof: From the MSS of system (1)-(2), we have from Proposition 3.6 in [30]. Based on the standard results for GAREs, we conclude that there exists a unique positive semi-definite solution to (85) where (see [48]).
Furthermore, satisfies
Define and
Let us show by induction that . Since
from (120) and (121), we have
By definition, we have . Suppose . From (122), we have . Therefore, we have shown by induction that holds for all .
From the MSS and ergodicity of the Markov chain, we obtain . Based on Proposition 3.36 in [30], it can be concluded that , where satisfies
and is the unique solution to (123). Recalling that satisfies (119), we know that is also a solution to (123). From the uniqueness of the solution, we have . Therefore, we have
and .
It follows from (124) and (84) that . Thus, we can conclude that when for . Moreover, from the fact that and , we have satisfies (85). From the uniqueness of the positive semi-definite solution to (85), we conclude that . From (124) and (84), we have . Since and as , we have . This completes the proof.

References
- Wang, Z.Q.; Liu, C.L. Wind turbine condition monitoring based on a novel multivariate state estimation technique. Measurement, 2021, 168: 108388. doi: 10.1016/j.measurement.2020.108388
- Erkec, T.Y.; Hajiyev, C. Fault-tolerant state estimation methods of cluster satellites. Adv. Space Res., 2023, 71: 3868−3882. doi: 10.1016/j.asr.2022.09.059
- Feng, F.; Zhang, P.; Zhou, Y.F.; et al. Quantum microgrid state estimation. Electr. Power Syst. Res., 2022, 212: 108386. doi: 10.1016/j.jpgr.2022.108386
- Rashed, M.; Gondal, I.; Kamruzzaman, J.; et al. State estimation within IED based smart grid using Kalman estimates. Electronics, 2021, 10: 1783. doi: 10.3390/electronics10151783
- Olariu, S.; El-Tawab, S. Introduction to the special issue on real-time traffic state estimation. IEEE Trans. Intell. Transp. Syst., 2023, 24: 1356−1358. doi: 10.1109/TITS.2022.3229480
- Barz, T.; Seliger, D.; Marx, K.; et al. State and state of charge estimation for a latent heat storage. Control Eng. Pract., 2018, 72: 151−166. doi: 10.1016/j.conengprac.2017.11.006
- Liu, L.; Yang, A.L.; Zhou, W.J.; et al. Modelling and estimation for uncertain systems with transmission delays, packet dropouts, and out-of-order packets. Complexity, 2018, 2018: 7531547. doi: 10.1155/2018/7531547
- Lin, H.; Su, H.Y.; Shi, P.; et al. Optimal estimation and control for lossy network: Stability, convergence, and performance. IEEE Trans. Autom. Control, 2017, 62: 4564−4579. doi: 10.1109/TAC.2017.2672729
- Ma, H.; Hu, W.; Tang, G.Y. Networked predictive vibration control for offshore platforms with random time delays, packet dropouts and disordering. J. Sound Vib., 2019, 441: 187−203. doi: 10.1016/j.jsv.2018.02.035
- Léchappé, V.; Rouquet, S.; González, A.; et al. Delay estimation and predictive control of uncertain systems with input delay: Application to a DC motor. IEEE Trans. Ind. Electron., 2016, 63: 5849−5857. doi: 10.1109/TIE.2016.2527692
- Ahmed, S.; Wang, H.P.; Tian, Y. Adaptive high-order terminal sliding mode control based on time delay estimation for the robotic manipulators with backlash hysteresis. IEEE Trans. Syst. Man Cybern. Syst., 2021, 51: 1128−1137. doi: 10.1109/TSMC.2019.2895588
- Sheng, L.; Wang, Y.C.; Gao, M.; et al. Finite-time H∞ filtering for nonlinear stochastic systems with multiplicative noises via carleman linearization technique. IEEE Trans. Aerosp. Electron. Syst., 2023, 59: 1774−1786. doi: 10.1109/TAES.2022.3205878
- Liu, S.; Wang, Z.D.; Wang, L.C.; et al. Finite-horizon H∞ filtering via a high-rate network with the FlexRay protocol. IEEE Trans. Autom. Control, 2023, 68: 3596−3603. doi: 10.1109/TAC.2022.3190791
- Kuti, J.; Rudas, I.J.; Gao, H.J.; et al. Computationally relaxed unscented Kalman filter. IEEE Trans. Cybern., 2023, 53: 1557−1565. doi: 10.1109/TCYB.2022.3181211
- Chen, L.; Zhou, S.Y.; Wang, W.D. MmWave beam tracking with spatial information based on extended Kalman filter. IEEE Wirel. Commun. Lett., 2023, 12: 615−619. doi: 10.1109/LWC.2023.3236622
- Zou, L.; Wang, Z.D.; Geng, H.; et al. Set-membership filtering subject to impulsive measurement outliers: A recursive algorithm. IEEE/CAA J. Autom. Sin., 2021, 8: 377−388. doi: 10.1109/JAS.2021.1003826
- Gao, Y.T.; Ma, L.F.; Zhang, M.J.; et al. Distributed set-membership filtering for nonlinear time-varying systems with dynamic coding–decoding communication protocol. IEEE Syst. J., 2022, 16: 2958−2967. doi: 10.1109/JSYST.2021.3063357
- Liu, Q.Y.; Wang, Z.D. Moving-horizon estimation for linear dynamic networks with binary encoding schemes. IEEE Trans. Autom. Control, 2021, 66: 1763−1770. doi: 10.1109/TAC.2020.2996579
- Zou, L.; Wang, Z.D.; Han, Q.L.; et al. Moving horizon estimation of networked nonlinear systems with random access protocol. IEEE Trans. Syst. Man Cybern. Syst., 2021, 51: 2937−2948. doi: 10.1109/TSMC.2019.2918002
- Tsividis, Y. Externally linear, time-invariant systems and their application to companding signal processors. IEEE Trans. Circuits Syst. II: Analog Digital Signal Proc., 1997, 44: 65−85. doi: 10.1109/82.554425
- Njima, C.B.; Mabrouk, W.B.; Messaoud, H. Finite time stabilization of linear systems by state feedback: Application to mixing tank system. In
2013 International Conference on Control, Decision and Information Technologies (CoDIT ),Hammamet, Tunisia, 06–08 May 2013 ; IEEE: New York, 2013; pp. 393–398. doi: 10.1109/CoDIT.2013.6689577 - Vu, V.P.; Do, T.D. Disturbance observer synthesis for linear systems: Application for DC motor. In
2019 International Conference on System Science and Engineering (ICSSE ),Dong Hoi, Vietnam, 20–21 July 2019 , IEEE: New York, 2019; pp. 433–436. doi: 10.1109/ICSSE.2019.8823127 - Priemer, R.; Vacroux, A. Estimation in linear discrete systems with multiple time delays. IEEE Trans. Autom. Control, 1969, 14: 384−387. doi: 10.1109/TAC.1969.1099195
- Chisci, L.; Mosca, E. Polynomial equations for the linear MMSE state estimation. IEEE Trans. Autom. Control, 1992, 37: 623−626. doi: 10.1109/9.135499
- Han, C.Y.; Li, C.C.; He, F.; et al. Receding horizon estimation for linear discrete-time systems with multi-channel observation delays. IEEE/CAA J. Autom. Sin., 2019, 6: 478−484. doi: 10.1109/JAS.2018.7511261
- Liu, M.Q.; Qi, D.L.; Zhang, S.L.; et al. Optimal H∞ fusion filters for a class of discrete-time intelligent systems with time delays and missing measurement. Neurocomputing, 2011, 74: 3741−3752. doi: 10.1016/j.neucom.2011.06.016
- Li, Z.J.; Sun, M.X.; Duan, Q.W.; et al. Robust state estimation for uncertain discrete linear systems with delayed measurements. Mathematics, 2022, 10: 1365. doi: 10.3390/math10091365
- Li, F.; Zhou, J.; Wu, D.Z. Optimal filtering for systems with finite-step autocorrelated noises and multiple packet dropouts. Aerosp. Sci. Technol., 2013, 24: 255−263. doi: 10.1016/j.ast.2011.11.013
- Xu, J.P.; Gu, G.X.; Gupta, V.; et al. Optimal stationary state estimation over multiple Markovian packet drop channels. Automatica, 2021, 128: 109561. doi: 10.1016/j.automatica.2021.109561
- Costa, O.L.V.; Marques, R.P.; Fragoso, M.D.
Discrete-Time Markov Jump Linear Systems ; Springer: London, 2005. doi: 10.1007/b138575 - Han, C.Y.; Zhang, H.S.; Fu, M.Y. Optimal filtering for networked systems with Markovian communication delays. Automatica, 2013, 49: 3097−3104. doi: 10.1016/j.automatica.2013.07.018
- Han, C.Y.; Wang, W. Optimal filter for MJL system with delayed modes and observations. IET Control Theory Appl., 2018, 12: 68−77. doi: 10.1049/iet-cta.2017.0692
- Han, C.Y.; Wang, W. Linear state estimation for Markov jump linear system with multi-channel observation delays and packet dropouts. Int. J. Syst. Sci., 2019, 50: 163−177. doi: 10.1080/00207721.2018.1551969
- Sun, S.L.; Wang, G.H. Modeling and estimation for networked systems with multiple random transmission delays and packet losses. Syst. Control Lett., 2014, 73: 6−16. doi: 10.1016/j.sysconle.2014.07.005
- Sun, S.L. Optimal linear filters for discrete-time systems with randomly delayed and lost measurements with/without time stamps. IEEE Trans. Autom. Control, 2013, 58: 1551−1556. doi: 10.1109/TAC.2012.2229812
- Geng, H.; Wang, Z.D.; Liang, Y.; et al. State estimation for asynchronous sensor systems with Markov jumps and multiplicative noises. Inf. Sci., 2017, 417: 1−19. doi: 10.1016/j.ins.2017.07.001
- Wei, Y.; Sun, S.L. Recursive distributed fusion estimation for multi-sensor systems with missing measurements, multiple random transmission delays and packet losses. Signal Proc., 2023, 204: 108829. doi: 10.1016/j.sigpro.2022.108829
- Benisi, N.Z.; Aminian, M.; Javadi, B. Blockchain-based decentralized storage networks: A survey. J. Netw. Comput. Appli., 2020, 162: 102656. doi: 10.1016/j.jnca.2020.102656
- Pu, C.L.; Cui, W.; Wu, J.X.; et al. Bufferless transmission in complex networks. IEEE Trans. Circuits Syst. II: Express Briefs, 2018, 65: 893−897. doi: 10.1109/TCSII.2017.2775622
- Ge, M.F.; Guan, Z.H.; Hu, B.; et al. Distributed controller–estimator for target tracking of networked robotic systems under sampled interaction. Automatica, 2016, 69: 410−417. doi: 10.1016/j.automatica.2016.03.008
- Cuenca, Á.; Ojha, U.; Salt, J.; et al. A non-uniform multi-rate control strategy for a Markov chain-driven Networked Control System. Inf. Sci., 2015, 321: 31−47. doi: 10.1016/j.ins.2015.05.035
- Lin, H.L.; Sun, S.L. An overview of multirate multisensor systems: Modelling and estimation. Inf. Fusion, 2019, 52: 335−343. doi: 10.1016/j.inffus.2019.05.002
- Andrisani, D.; Gau, C.F. Estimation using a multirate filter. IEEE Trans. Autom. Control, 1987, 32: 653−656. doi: 10.1109/TAC.1987.1104672
- Shen, Y.X.; Wang, Z.D.; Dong, H.L.; et al. Multi-sensor multi-rate fusion estimation for networked systems: Advances and perspectives. Inf. Fusion, 2022, 82: 19−27. doi: 10.1016/j.inffus.2021.12.005
- Liang, Y.; Chen, T.W.; Pan, Q. Multi-rate optimal state estimation. Int. J. Control, 2009, 82: 2059−2076. doi: 10.1080/00207170902906132
- Ravi, A.; Narasimhan, S.; Kaisare, N.S. Sampled Output augmentation method for handling measurement delays in multirate Kalman filter. Chem. Eng. Sci., 2020, 224: 115763. doi: 10.1016/j.ces.2020.115763
- Lin, H.L.; Sun, S.L. State Estimation for a class of non-uniform sampling systems with missing measurements. Sensors, 2016, 16: 1155. doi: 10.3390/s16081155
- Callier, F.M.; Desoer, C.A.
Linear System Theory ; Springer: New York, 1991. doi: 10.1007/978-1-4612-0957-7


